the last image is very clear plz ignore the others
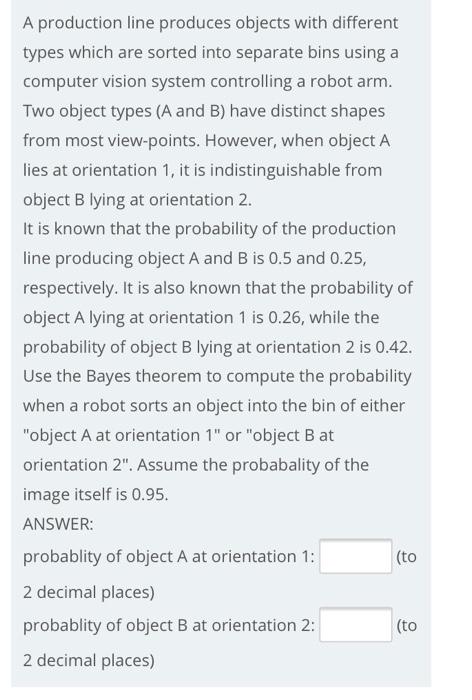
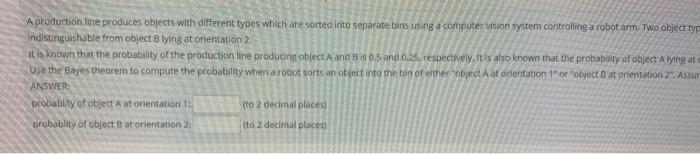
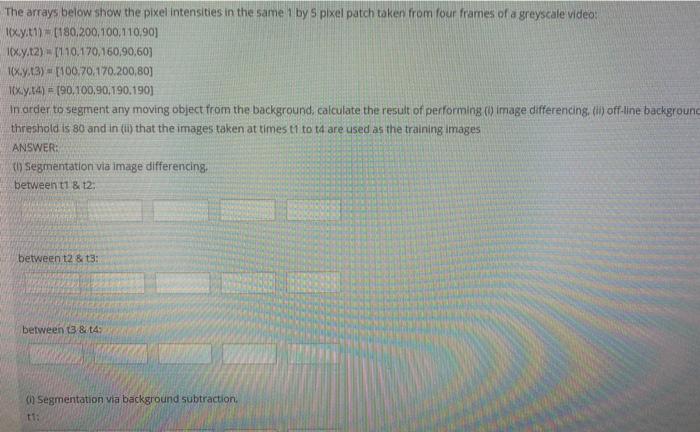
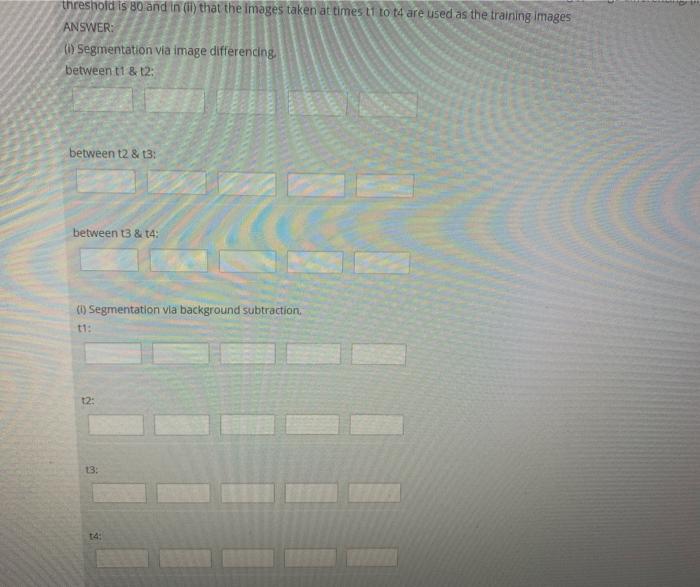
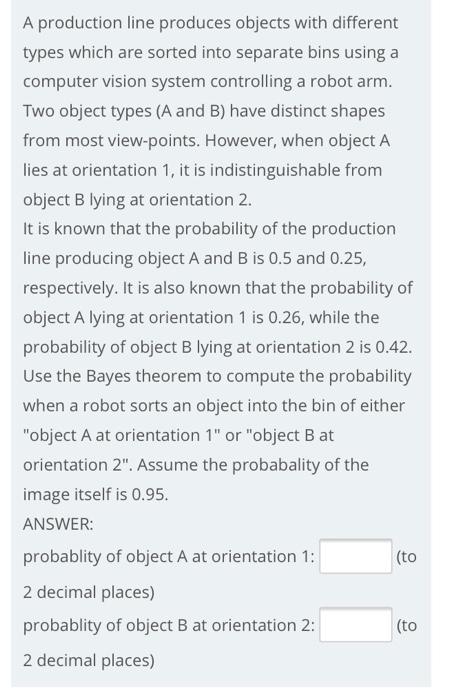
ht Aphone with whics are com ingetoon the continen use the aesthemen co Bol Atent baby one 002 A production line produces objects with different types which are sorted into separate bins using a computer vision system controlling a robot arm Two object typ Indistinguishable from object B lying at orientation 2 It is known that the probability of the production line producing object A and B is 0.5 and 0.25, respectively. It is also known that the probability of object Alying at Use the Bayes theorem to compute the probability when a robot sorts an object into the bin of either "objed.A at orientation or object B at orientation 2: Assur ANSWER: probability of objectatorientation 1: (to 2 decimal places) probability of objects orientation 2 (to 2 decimal places carte bins using computer vision system controlling arocitam. Two object types and have distinct shapes from most view points. However, when object Alles at orientation is and 2 respectively, it is also known that the probability of objectA lying at orientation 1 0.26 while the probability of object Blying atentation 20:42 in the mother object Astorientation 1 or object orientation Assume the probability of the image self 95 The arrays below show the pixel intensities in the same by 5 pixel patch taken from four frames of a greyscale video: wxy.t11180,200,100,110.90) ixy.12) - 1110.170.160.90,60) X13) [10070.170.200,80] Nox.y.4) = (90,100,90,190.190) inorder to segment any moving object from the background, calculate the result of performing image differencing, di) off-line background threshold is 80 and in (ll) that the images taken at times ti to t4 are used as the training images ANSWER: 0 segmentation via image differencing between t1 & 12 between t2 & t3: between 384 (Segmentation via background subtraction, P Flag question el patch taken from four frames of a greyscale video: culate the result of performing (1) image differencing, (ii) off-line background subtraction. In both cases, assume that the are used as the training images threshold is 80 and in all that the images taken at times t1 to t4 are used as the training images ANSWER: 1) Segmentation via image differending between t1 & 12 between t2 & 13: between 13 & 14 (1) Segmentation via background Subtraction, 12: 13: A production line produces objects with different types which are sorted into separate bins using a computer vision system controlling a robot arm. Two object types (A and B) have distinct shapes from most view-points. However, when object A lies at orientation 1, it is indistinguishable from object B lying at orientation 2. It is known that the probability of the production line producing object A and B is 0.5 and 0.25, respectively. It is also known that the probability of object A lying at orientation 1 is 0.26, while the probability of object B lying at orientation 2 is 0.42. Use the Bayes theorem to compute the probability when a robot sorts an object into the bin of either "object A at orientation 1" or "object B at orientation 2". Assume the probabality of the image itself is 0.95. ANSWER: probablity of object A at orientation 1: (to 2 decimal places) probablity of object B at orientation 2: ( 2 decimal places) (to A production line produces objects with different types which are sorted into separate bins using a computer vision system controlling a robot arm. Two object types (A and B) have distinct shapes from most view-points. However, when object A lies at orientation 1, it is indistinguishable from object B lying at orientation 2. It is known that the probability of the production line producing object A and B is 0.5 and 0.25, respectively. It is also known that the probability of object A lying at orientation 1 is 0.26, while the probability of object B lying at orientation 2 is 0.42. Use the Bayes theorem to compute the probability when a robot sorts an object into the bin of either "object A at orientation 1" or "object B at orientation 2". Assume the probabality of the image itself is 0.95. ANSWER: probablity of object A at orientation 1: (to 2 decimal places) probablity of object B at orientation 2: ( 2 decimal places) (to ht Aphone with whics are com ingetoon the continen use the aesthemen co Bol Atent baby one 002 A production line produces objects with different types which are sorted into separate bins using a computer vision system controlling a robot arm Two object typ Indistinguishable from object B lying at orientation 2 It is known that the probability of the production line producing object A and B is 0.5 and 0.25, respectively. It is also known that the probability of object Alying at Use the Bayes theorem to compute the probability when a robot sorts an object into the bin of either "objed.A at orientation or object B at orientation 2: Assur ANSWER: probability of objectatorientation 1: (to 2 decimal places) probability of objects orientation 2 (to 2 decimal places carte bins using computer vision system controlling arocitam. Two object types and have distinct shapes from most view points. However, when object Alles at orientation is and 2 respectively, it is also known that the probability of objectA lying at orientation 1 0.26 while the probability of object Blying atentation 20:42 in the mother object Astorientation 1 or object orientation Assume the probability of the image self 95 The arrays below show the pixel intensities in the same by 5 pixel patch taken from four frames of a greyscale video: wxy.t11180,200,100,110.90) ixy.12) - 1110.170.160.90,60) X13) [10070.170.200,80] Nox.y.4) = (90,100,90,190.190) inorder to segment any moving object from the background, calculate the result of performing image differencing, di) off-line background threshold is 80 and in (ll) that the images taken at times ti to t4 are used as the training images ANSWER: 0 segmentation via image differencing between t1 & 12 between t2 & t3: between 384 (Segmentation via background subtraction, P Flag question el patch taken from four frames of a greyscale video: culate the result of performing (1) image differencing, (ii) off-line background subtraction. In both cases, assume that the are used as the training images threshold is 80 and in all that the images taken at times t1 to t4 are used as the training images ANSWER: 1) Segmentation via image differending between t1 & 12 between t2 & 13: between 13 & 14 (1) Segmentation via background Subtraction, 12: 13: A production line produces objects with different types which are sorted into separate bins using a computer vision system controlling a robot arm. Two object types (A and B) have distinct shapes from most view-points. However, when object A lies at orientation 1, it is indistinguishable from object B lying at orientation 2. It is known that the probability of the production line producing object A and B is 0.5 and 0.25, respectively. It is also known that the probability of object A lying at orientation 1 is 0.26, while the probability of object B lying at orientation 2 is 0.42. Use the Bayes theorem to compute the probability when a robot sorts an object into the bin of either "object A at orientation 1" or "object B at orientation 2". Assume the probabality of the image itself is 0.95. ANSWER: probablity of object A at orientation 1: (to 2 decimal places) probablity of object B at orientation 2: ( 2 decimal places) (to A production line produces objects with different types which are sorted into separate bins using a computer vision system controlling a robot arm. Two object types (A and B) have distinct shapes from most view-points. However, when object A lies at orientation 1, it is indistinguishable from object B lying at orientation 2. It is known that the probability of the production line producing object A and B is 0.5 and 0.25, respectively. It is also known that the probability of object A lying at orientation 1 is 0.26, while the probability of object B lying at orientation 2 is 0.42. Use the Bayes theorem to compute the probability when a robot sorts an object into the bin of either "object A at orientation 1" or "object B at orientation 2". Assume the probabality of the image itself is 0.95. ANSWER: probablity of object A at orientation 1: (to 2 decimal places) probablity of object B at orientation 2: ( 2 decimal places) (to