

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
The slider crank in part (a) must be drawn using matlab code. CP is changed to 6 in. Theta is arbitrary. I got this far.
The slider crank in part (a) must be drawn using matlab code. CP is changed to 6 in. Theta is arbitrary.
I got this far. Im missing something that I cant figure out. Please help. I need to make this rotate.
Clc
Clear
AB=3.5;
AC=2;
CP=6;
Ax=0;
Ay=0;
Cx=AC;
Cy=0;
For th=0:2*pi/36:10*pi;
Bx=AB*cos(th);
By=AB*sin(th);
CB=sqrt(AB^2+AC^2-2*AB*AC*cos(th) );
th5=acos( (AC^2+CB^2-AB^2)/(2*AC*CB) );
If(By 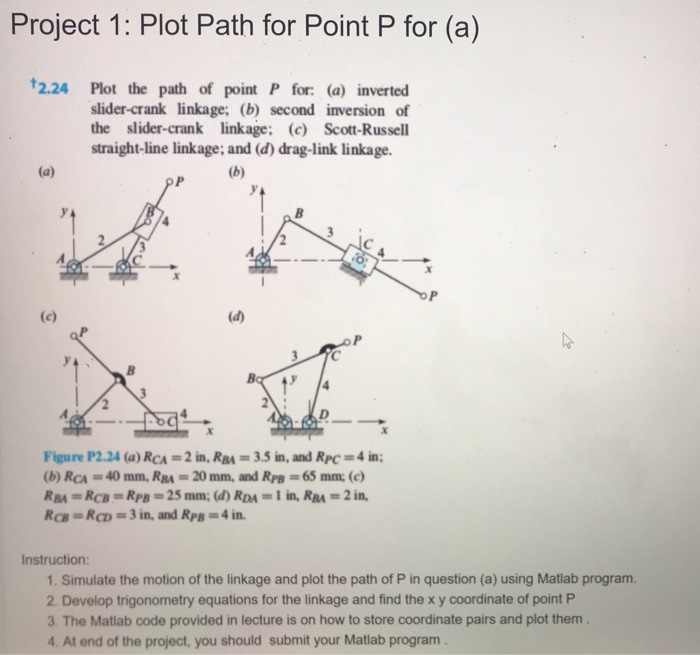
Project 1: Plot Path for Point P for (a) 2.24 Plot the path of poit P for (a) inverted slider-crank linkage; (b) second inversion of the slider-crank linkage; (c) Scott-Russell straight-line linkage; and (d) drag-link linkage. Figure P2.24 (a) RCA2 in, RBA-3.5 in, and Rpc 4 in; (b) RCA40 mm, RBA- 20mm, and RpB -65 mm: (c) RCB RCD 3 in, and RPB 4 in. Instruction: 1. Simulate the motion of the linkage and plot the path of P in question (a) using Matlab program. 2. Develop trigonometry equations for the linkage and find the x y coordinate of pointP 3 The Matlab code provided in lecture is on how to store coordinate pairs and plot them 4. At end of the project, you should submit your Matiab program th4=pi+th5;
Else
th4=pi-th5;
End
Px=CP*cos(th4)+AC;
Py=CP*sin(th4);
Plot( [Ax Bx], [Ay By], re-); hold on;
Plot( [Cx Bx], [Cy By], gr-); hold on;
Plot( [Ax Cx], [Ay Cy], bl-); hold on;
Plot( [Bx Px], [By Py], Cy-); hold off;
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Development Of Knowledge Framework For Affective Content Analysis
Authors: Swarnangini Sinha
1st Edition
B0CQJ13WZ1, 979-8223977490