

Question
This code is for Arduino. It requires an .ino file Provided motor test code: void setup() { //Setup right motor pinMode(6, OUTPUT); //Initiates right motor
This code is for Arduino. It requires an .ino file
Provided motor test code:
void setup() {
//Setup right motor
pinMode(6, OUTPUT); //Initiates right motor pin
pinMode(7, OUTPUT); //Initiates right brake pin
//Setup left motor
pinMode(9, OUTPUT); //Initiates left motor pin
pinMode(8, OUTPUT); //Initiates left brake pin
}
void loop(){
//Right motor forward @ full speed
digitalWrite(6, HIGH); //Establishes forward direction of right motor
digitalWrite(7, LOW); //Disengage the right brake
analogWrite(5, 255); //Spins the right motor at full speed
//Left motor backward @ half speed
digitalWrite(9, LOW); //Establishes backward direction of left motor
digitalWrite(8, LOW); //Disengage the left brake
analogWrite(10, 123); //Spins the left motor at half speed
delay(3000);
digitalWrite(7, HIGH); //Engage the right brake
digitalWrite(8, HIGH); //Engage the left brake
delay(1000);
//Right motor forward @ full speed
digitalWrite(6, LOW); //Establishes backward direction of right motor
digitalWrite(7, LOW); //Disengage the right brake
analogWrite(5, 123); //Spins the right motor at half speed
//Left motor forward @ full speed
digitalWrite(9, HIGH); //Establishes forward direction of left motor
digitalWrite(8, LOW); //Disengage the left brake
analogWrite(10, 255); //Spins the left motor at full speed
delay(3000);
digitalWrite(7, HIGH); //Engage the right brake
digitalWrite(8, HIGH); //Engage the left brake
delay(1000);
}
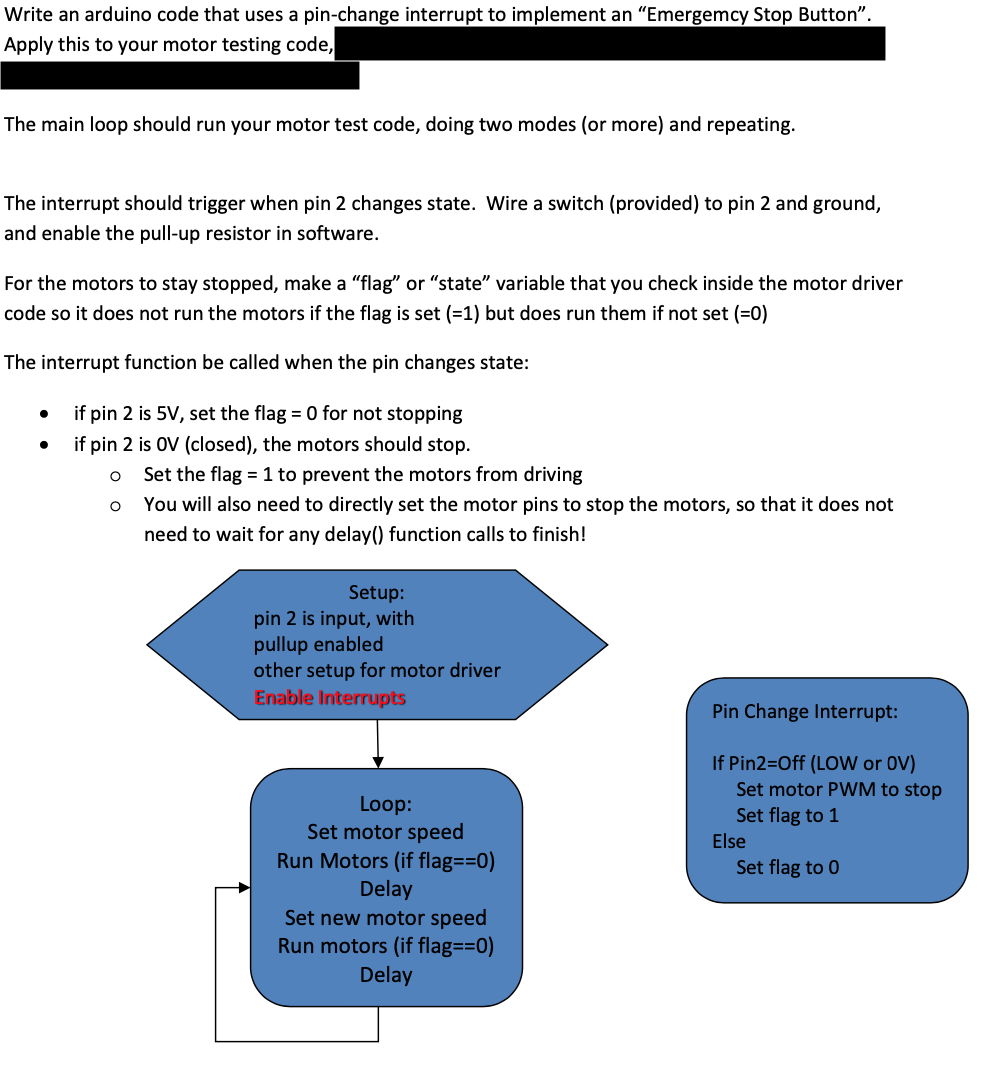
Write an arduino code that uses a pin-change interrupt to implement an "Emergemcy Stop Button". Apply this to your motor testing code, The main loop should run your motor test code, doing two modes (or more) and repeating. The interrupt should trigger when pin 2 changes state. Wire a switch (provided) to pin 2 and ground, and enable the pull-up resistor in software. For the motors to stay stopped, make a "flag" or "state" variable that you check inside the motor driver code so it does not run the motors if the flag is set (=1) but does run them if not set (=0) The interrupt function be called when the pin changes state: - if pin 2 is 5V, set the flag =0 for not stopping - if pin 2 is 0V (closed), the motors should stop. - Set the flag =1 to prevent the motors from driving - You will also need to directly set the motor pins to stop the motors, so that it does not need to wait for any delay() function calls to finishStep by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
SQL Server T-SQL Recipes
Authors: David Dye, Jason Brimhall
4th Edition
1484200616, 9781484200612