

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
this is the inforkation of the questions and here are the questions all answers must be in matrix form and integers In terms of the
this is the inforkation of the questions

and here are the questions
all answers must be in matrix form and integers
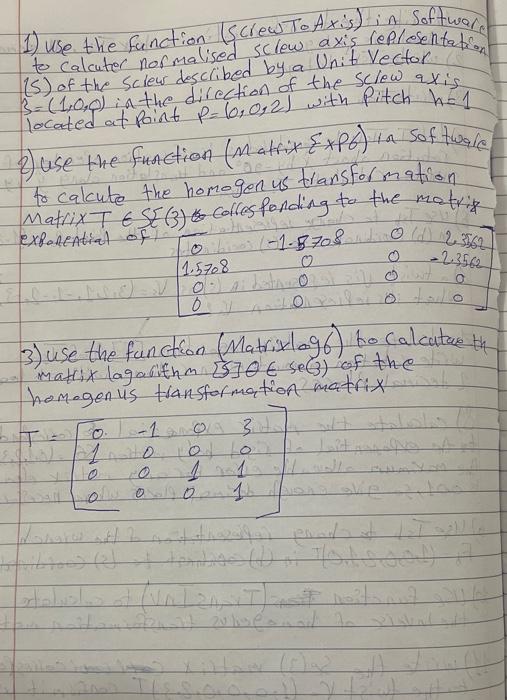
In terms of the x^s,y^s,,z^s coordinates of a fixed space frame \{s\}, the frame (a) has its x^a-axis pointing in the direction (0,0,1) and its y^a-axis pointing in the direction (1,0,0),and frame (b) has its xb-axis pointing in the direction (1,0,0) and its y^b-axis pointing in the direction (0,0,1). The origin of fo) is at (0,0,1) in (s) and the origin of fb) is at (0,2,0). Draw the (s),(a), yed (b) frames, similar to examples in the book and videos, for easy reference in this question and later questions. 10) Use function (Trans InV) to calculate the inverse of homogenas transformation matrix 11) write the Se(3) matrix colresponding to the twist r=(1,0,0,0,2,3)T confirm it using Function (Vectoses) in softwale 1) Use the function (SCrew To Axis) in Softwar to calcuter normalised sclew axis replosentation (5) of the sclew described by a Unit Vector 3=(1,0,0) in the direction of the sclew ax is located at point p=(0,0,2) with Pitch h=1 2) use the function (Matrix P ) a sof twate to calcute the homogen us transformation Matrix TS(3) cofresfording to the matrit exponential of 01.5708001.570800000002.3522.356200 3) use the function (Matrixlog6) to Calcutar th matix lagarithm [s] se(3) of the homogenus transformation matrix T=0100100000103011 In terms of the x^s,y^s,,z^s coordinates of a fixed space frame \{s\}, the frame (a) has its x^a-axis pointing in the direction (0,0,1) and its y^a-axis pointing in the direction (1,0,0),and frame (b) has its xb-axis pointing in the direction (1,0,0) and its y^b-axis pointing in the direction (0,0,1). The origin of fo) is at (0,0,1) in (s) and the origin of fb) is at (0,2,0). Draw the (s),(a), yed (b) frames, similar to examples in the book and videos, for easy reference in this question and later questions. 10) Use function (Trans InV) to calculate the inverse of homogenas transformation matrix 11) write the Se(3) matrix colresponding to the twist r=(1,0,0,0,2,3)T confirm it using Function (Vectoses) in softwale 1) Use the function (SCrew To Axis) in Softwar to calcuter normalised sclew axis replosentation (5) of the sclew described by a Unit Vector 3=(1,0,0) in the direction of the sclew ax is located at point p=(0,0,2) with Pitch h=1 2) use the function (Matrix P ) a sof twate to calcute the homogen us transformation Matrix TS(3) cofresfording to the matrit exponential of 01.5708001.570800000002.3522.356200 3) use the function (Matrixlog6) to Calcutar th matix lagarithm [s] se(3) of the homogenus transformation matrix T=0100100000103011 Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Heat Transfer
Authors: Jack Holman
10th edition
73529362, 978-0073529363