

Question: Use MATLAB to do this problem The figure above shows a robot arm with two motor joints. The lengths are L_1 = 4' and L_2
Use MATLAB to do this problem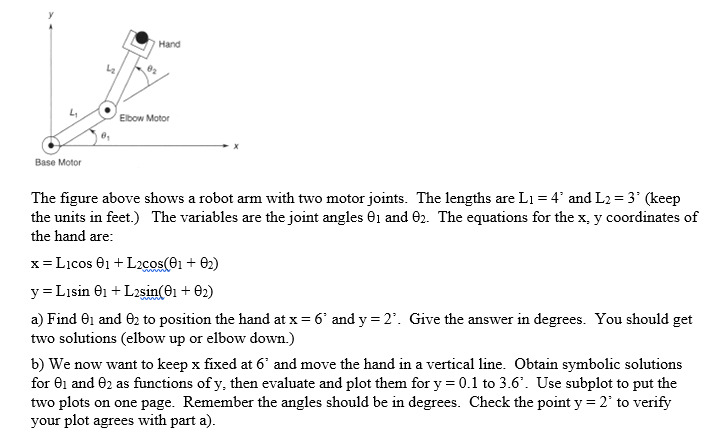
The figure above shows a robot arm with two motor joints. The lengths are L_1 = 4' and L_2 = 3' (keep the units in feet.) The variables are the joint angles theta_1 and theta_2. The equations for the x, y coordinates of the hand are: x = L_1 cos theta_1 + L_2 cos (theta_1 + theta_2) y = L_1 sin theta_1 + L_2 sin (theta_1 + theta_2) a) Find theta_1 and theta_2 to position the hand at x = 6 and y = 2. Give the answer in degrees. You should get two solutions (elbow up or elbow down.) b) We now want to keep x fixed at 6' and move the hand in a vertical line. Obtain symbolic solutions for theta_1 and theta_2 as functions of y, then evaluate and plot them for y = 0.1 to 3.6'. Use subplot to put the two plots on one page. Remember the angles should be in degrees. Check the point y = 2 to verify your plot agrees with part a)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts