

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
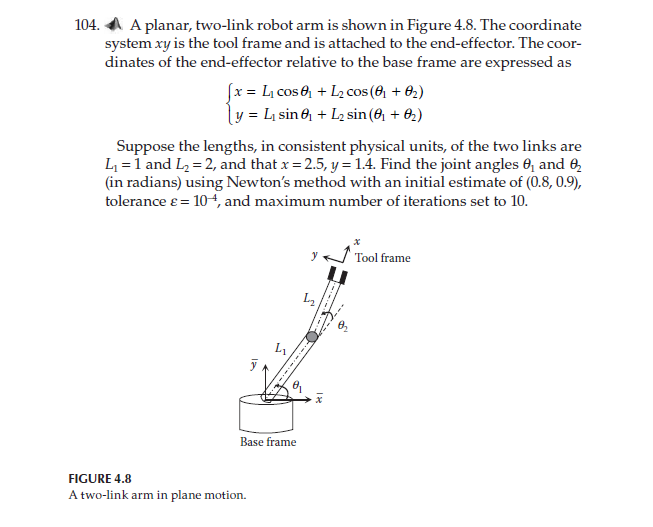
(using Matlab) 104.A planar, two-link robot arm is shown in Figure 4.8. The coordinate system xy is the tool frame and is attached to the
(using Matlab)
104.A planar, two-link robot arm is shown in Figure 4.8. The coordinate system xy is the tool frame and is attached to the end-effector. The coor- dinates of the end-effector relative to the base frame are expressed as Suppose the lengths, in consistent physical units, of the two links are L,-1 and L2-2, and that x = 2.5, y-1.4. Find the joint angles , and& (in radians) using Newton's method with an initial estimate of (0.8, 0.9), tolerance = 10-4, and maximum number of iterations set to 10 Tool frame ! Base frame FIGURE 4.8 A two-link arm in plane motionStep by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Oracle Database Administration The Essential Reference
Authors: Brian Laskey, David Kreines
1st Edition
1565925165, 978-1565925168