

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
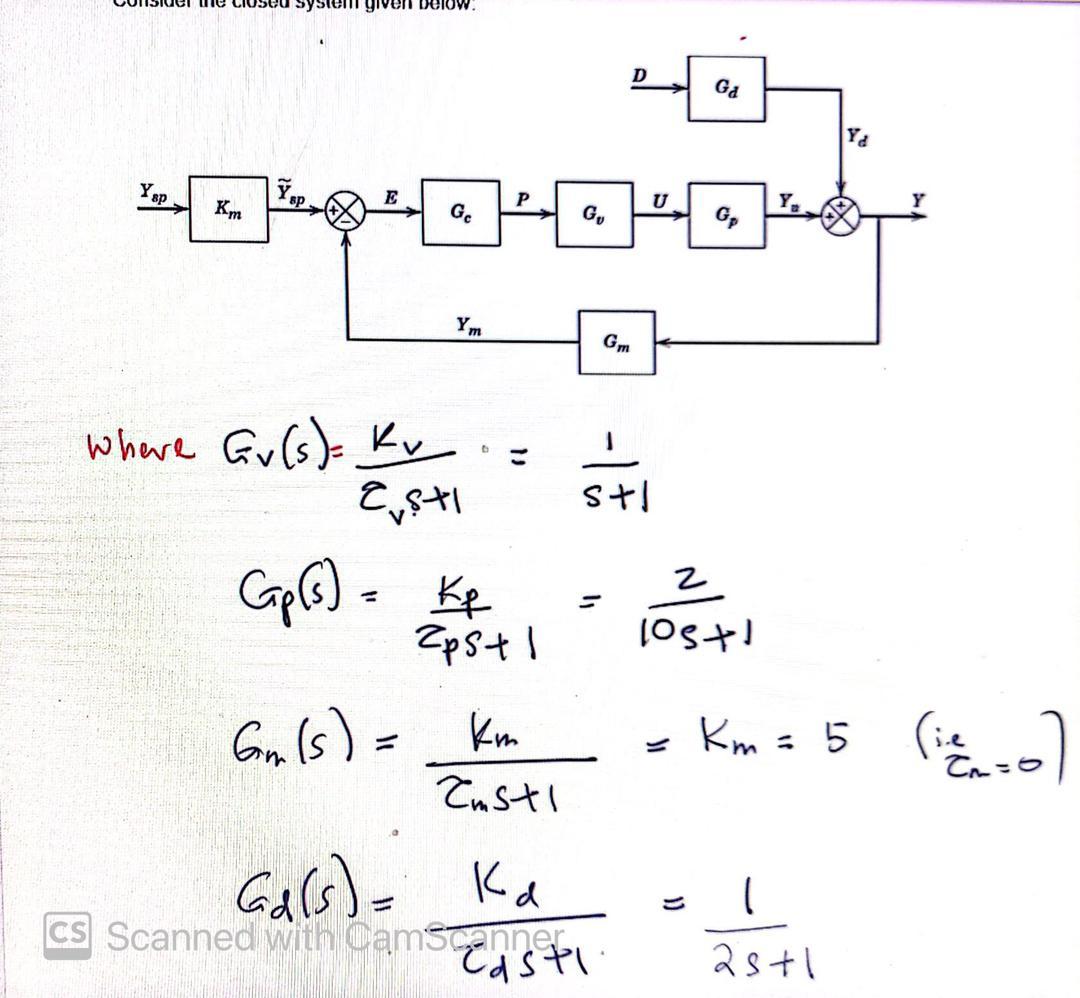
WE USE System given below. D Ga Ya Y sp E U Km Y, GC G Popuko-oh G Ym Gm - 1 1 + 108
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Surfactant Enhanced Subsurface Remediation Emerging Technologies
Authors: David A. Sabatini, Robert C. Knox, Jeffrey H. Harwell
1st Edition
0841232253, 978-0841232259