

Question: You have learnt the purpose of implementing compensators or controllers in the control loop to achieve certain performance criteria. The types of compensators discussed were
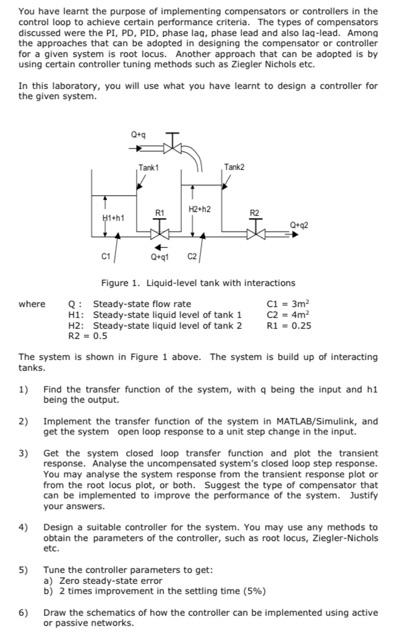
You have learnt the purpose of implementing compensators or controllers in the control loop to achieve certain performance criteria. The types of compensators discussed were the PI, PD, PID, phase lag, phase lead and also laq-lead. Amonq the approaches that can be adopted in designing the compensator or controller for a given system is root locus. Another approach that can be adopted is by using certain controller tuning methods such as Ziegler Nichols etc. In this laboratory, you will use what you have learnt to design a controller for the given system. Figure 1. Liquid-level tank with interactions whereR2=0.5Q:5Seady-stateflowrateH1:Steady-stateliquidleveloftank1H2:Steady-stateliquidleveloftank2Cl=3m2C=4m2R=0.25 The system is shown in Figure 1 above. The system is build up of interacting tanks. 1) Find the transfer function of the system, with a being the input and h1 being the output. 2) Implement the transfer function of the system in MATLAB/Simulink, and get the system open loop response to a unit step change in the input. 3) Get the system closed loop transfer function and plot the transient response. Analyse the uncompensated system's closed loop step response. You may analyse the system response from the transient response plot or from the root locus plot, or both. Suggest the type of compensator that can be implemented to improve the performance of the system. Justify your answers. 4) Design a suitable controller for the system. You may use any methods to obtain the parameters of the controller, such as root locus, Ziegler-Nichols etc. 5) Tune the controller parameters to get: a) Zero steady-state error b) 2 times improvement in the settling time ( 5% ) 6) Draw the schematics of how the controller can be implemented using active or passive networks. You have learnt the purpose of implementing compensators or controllers in the control loop to achieve certain performance criteria. The types of compensators discussed were the PI, PD, PID, phase lag, phase lead and also laq-lead. Amonq the approaches that can be adopted in designing the compensator or controller for a given system is root locus. Another approach that can be adopted is by using certain controller tuning methods such as Ziegler Nichols etc. In this laboratory, you will use what you have learnt to design a controller for the given system. Figure 1. Liquid-level tank with interactions whereR2=0.5Q:5Seady-stateflowrateH1:Steady-stateliquidleveloftank1H2:Steady-stateliquidleveloftank2Cl=3m2C=4m2R=0.25 The system is shown in Figure 1 above. The system is build up of interacting tanks. 1) Find the transfer function of the system, with a being the input and h1 being the output. 2) Implement the transfer function of the system in MATLAB/Simulink, and get the system open loop response to a unit step change in the input. 3) Get the system closed loop transfer function and plot the transient response. Analyse the uncompensated system's closed loop step response. You may analyse the system response from the transient response plot or from the root locus plot, or both. Suggest the type of compensator that can be implemented to improve the performance of the system. Justify your answers. 4) Design a suitable controller for the system. You may use any methods to obtain the parameters of the controller, such as root locus, Ziegler-Nichols etc. 5) Tune the controller parameters to get: a) Zero steady-state error b) 2 times improvement in the settling time ( 5% ) 6) Draw the schematics of how the controller can be implemented using active or passive networks
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts