

An upgrade to one of your company's robotics products requires a proportional plus integral compensator that implements
Question:
An upgrade to one of your company's robotics products requires a proportional plus integral compensator that implements the input-output relationship
\[
v_{\mathrm{O}}(t)=v_{\mathrm{S}}(t)+50 \int_{0}^{t} v_{\mathrm{S}}(x) d x
\]
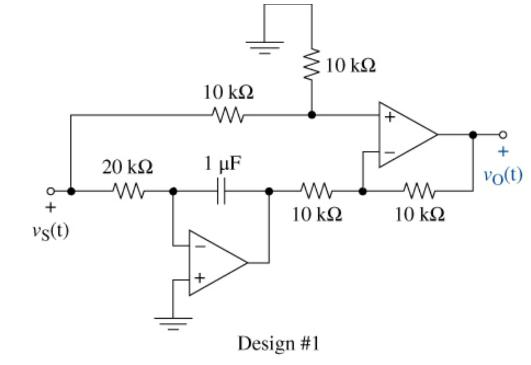
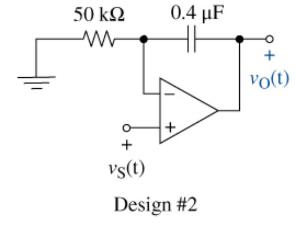
The input voltage \(v_{\mathrm{S}}(t)\) comes from an OP AMP, and the output voltage \(v_{\mathrm{O}}(t)\) drives a \(10-\mathrm{k} \Omega\) resistive load. Two competing designs are shown in Figure P6-54. As the project engineer, you are responsible for recommending one of these designs for production. Which design would you recommend and why? (Your mentor, a wise senior engineer, suggests that you first check that both designs implement the required signalprocessing function.)
Step by Step Answer:
The circuit in Design 1 is a subtractor with two inputs The upper input uses volt...View the full answer


The Analysis And Design Of Linear Circuits
ISBN: 9781119913023
10th Edition
Authors: Roland E. Thomas, Albert J. Rosa, Gregory J. Toussaint
