

A two degree of freedom spring-mass-damper system is shown in Fig. P5.4. For harmonic forced vibration (due
Question:
A two degree of freedom spring-mass-damper system is shown in Fig. P5.4. For harmonic forced vibration (due to the external force at coordinate \(x_{1}\) ), complete the following if \(k_{1}=2 \times 10^{5} \mathrm{~N} / \mathrm{m}, c_{1}=60 \mathrm{~N}-\mathrm{s} / \mathrm{m}, m_{1}=2.5 \mathrm{~kg}\), \(k_{2}=5.5 \times 10^{4} \mathrm{~N} / \mathrm{m}, c_{2}=16.5 \mathrm{~N}-\mathrm{s} / \mathrm{m}\), and \(m_{2}=1.2 \mathrm{~kg}\).
(a) Verify that proportional damping exists.
(b) Define the modal matrix and determine the modal mass, stiffness, and damping matrices. Note that the mode shapes should be normalized to the force location.
(c) Write expressions for the uncoupled single degree of freedom FRFs in modal coordinates, \(Q_{1} / R_{1}\) and \(Q_{2} / R_{2}\), and the direct FRF in local coordinates, \(X_{1} / F_{1}\).
(d) Plot the real and imaginary parts of the direct FRF, \(X_{1} / F_{1}\). Units should be \(\mathrm{m} / \mathrm{N}\) for the vertical axis and rad/s for the horizontal (frequency) axis. Use a frequency range of omega \(=0: 0.1: 500 ;(\mathrm{rad} / \mathrm{s})\).
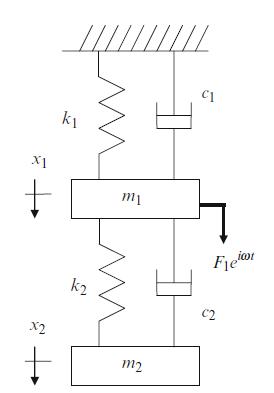
Fig. P5.4 Two degree of freedom spring- mass-damper system under forced vibration.
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!

Mechanical Vibrations Modeling And Measurement
ISBN: 119669
1st Edition
Authors: Tony L. Schmitz , K. Scott Smith
