

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
2.2 Simulation based on non-linear model of the plant You may do simulation either in Simulink (Figure 2 and Figure 3) or in MATLAB
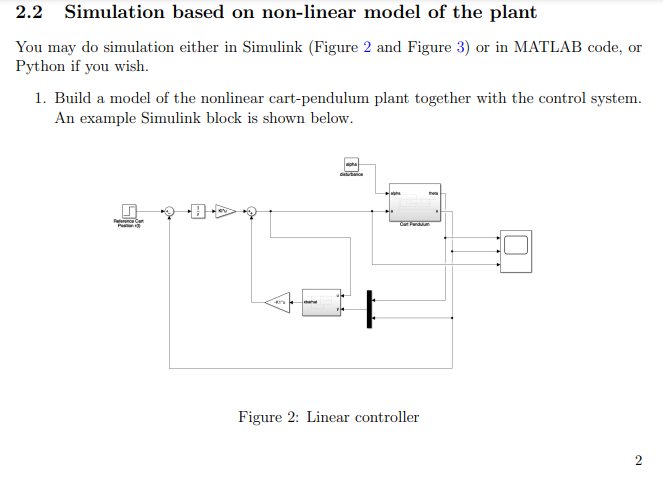
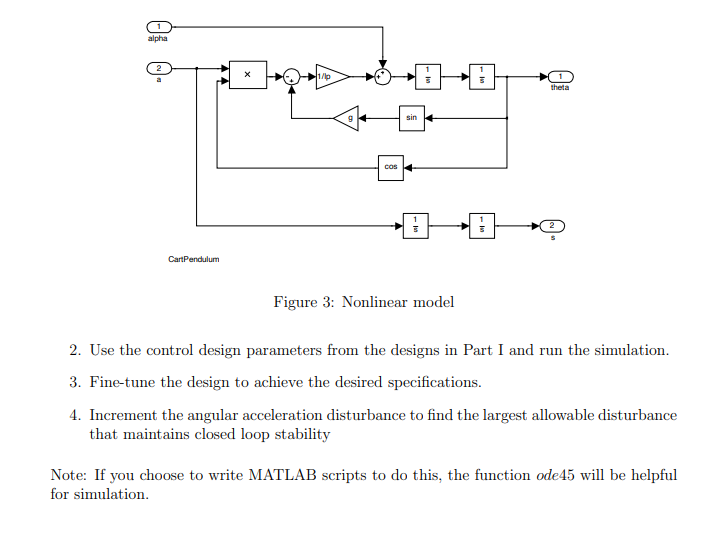
2.2 Simulation based on non-linear model of the plant You may do simulation either in Simulink (Figure 2 and Figure 3) or in MATLAB code, or Python if you wish. 1. Build a model of the nonlinear cart-pendulum plant together with the control system. An example Simulink block is shown below. disturbance | Cart Fandum Figure 2: Linear controller 2 alpha 2 1/lp CartPendulum 9 sin cos theta Figure 3: Nonlinear model 2. Use the control design parameters from the designs in Part I and run the simulation. 3. Fine-tune the design to achieve the desired specifications. 4. Increment the angular acceleration disturbance to find the largest allowable disturbance that maintains closed loop stability Note: If you choose to write MATLAB scripts to do this, the function ode45 will be helpful for simulation.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
System Dynamics
Authors: William Palm III
3rd edition
73398063, 978-0073398068