

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
5) Consider a three-joint SCARA robot in Fig 1 (PPR robot, we ignore axis 4 in the figure for simplicity). The coordinate frames are
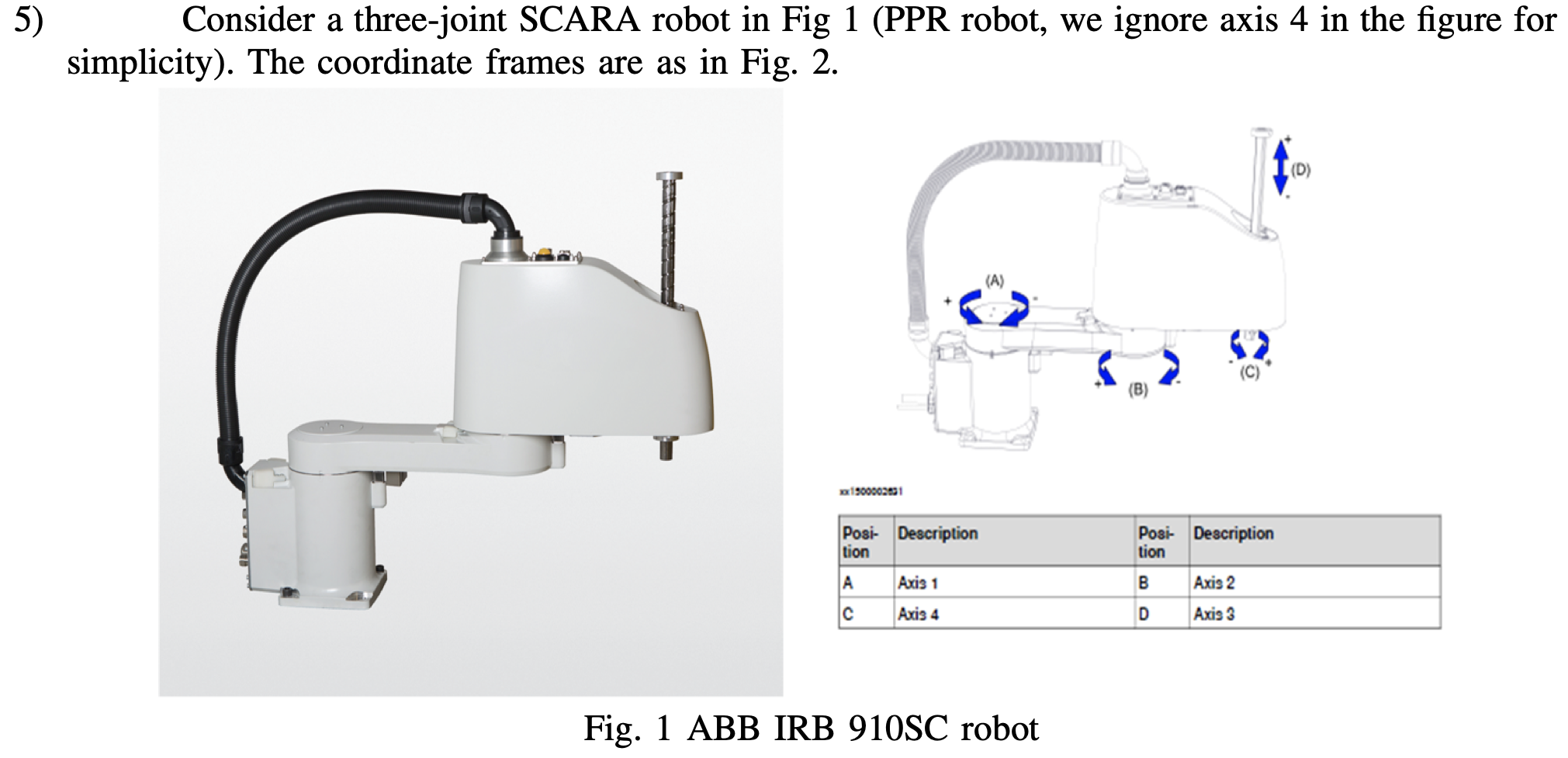
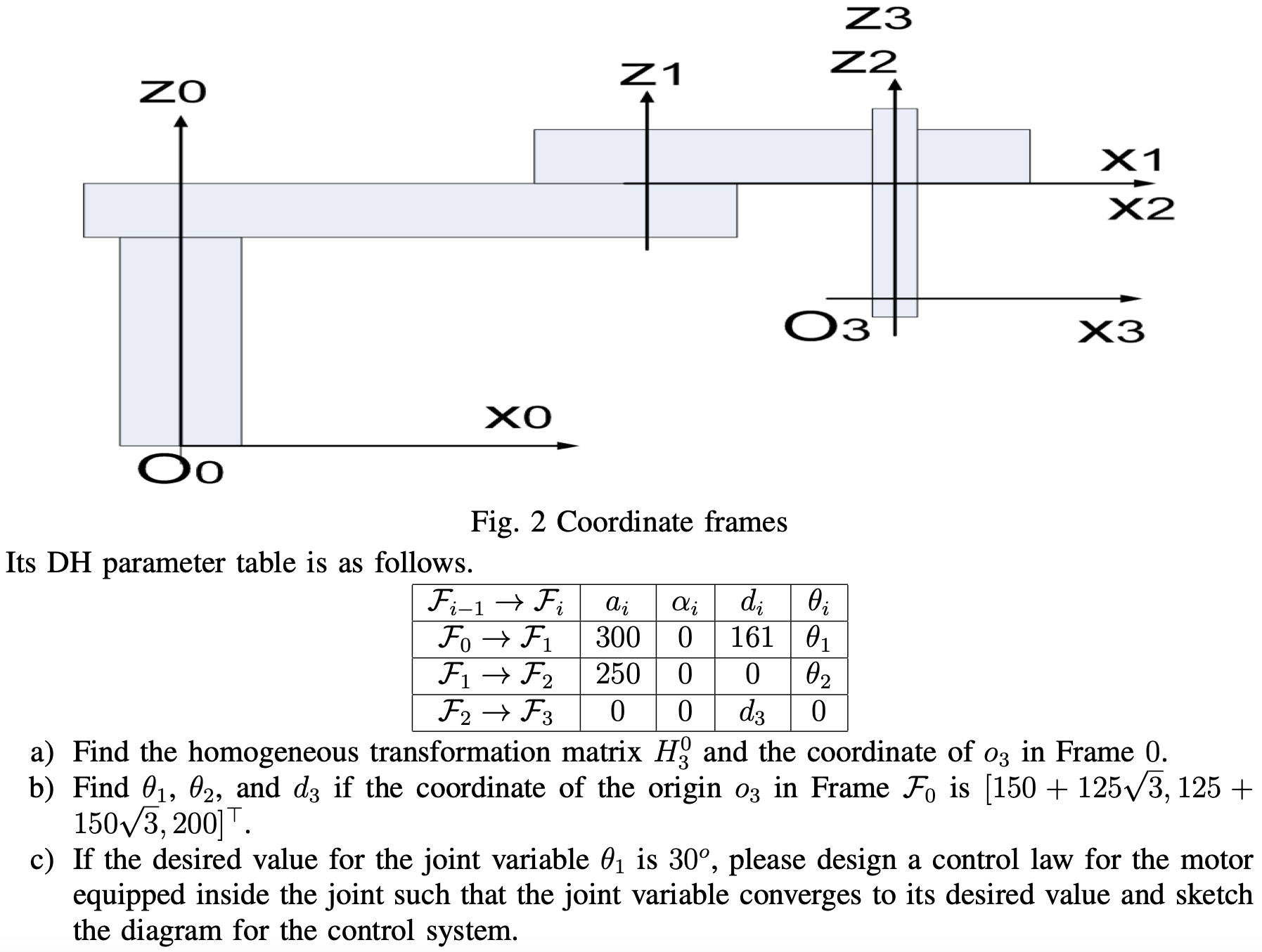
5) Consider a three-joint SCARA robot in Fig 1 (PPR robot, we ignore axis 4 in the figure for simplicity). The coordinate frames are as in Fig. 2. xx1500002631 Posi- Description tion A C Axis 1 Axis 4 Fig. 1 ABB IRB 910SC robot (B) Posi- Description tion B D Axis 2 Axis 3 (D) ZO XO Its DH parameter table is as follows. Z1 Fig. 2 Coordinate frames Fi-1 Fi Fo Fi F F F2 F3 Z2 O3 Z3 Ai 300 0 Xi di 0 161 250 0 0 0 0 da 0 0 0 X1 X2 X3 a) Find the homogeneous transformation matrix Hg and the coordinate of 03 in Frame 0. b) Find 0, 02, and d3 if the coordinate of the origin 03 in Frame Fo is [150+ 125/3, 125 + 1503, 200]T. c) If the desired value for the joint variable 0 is 30, please design a control law for the motor equipped inside the joint such that the joint variable converges to its desired value and sketch the diagram for the control system.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
College Physics A Strategic Approach
Authors: Randall D. Knight, Brian Jones, Stuart Field
2nd Edition
0321595491, 9780321595492