

Question: Consider the armature-controlled DC motor driven single link robot arm as shown in figure. Mass moment of inertia of the motor and load are
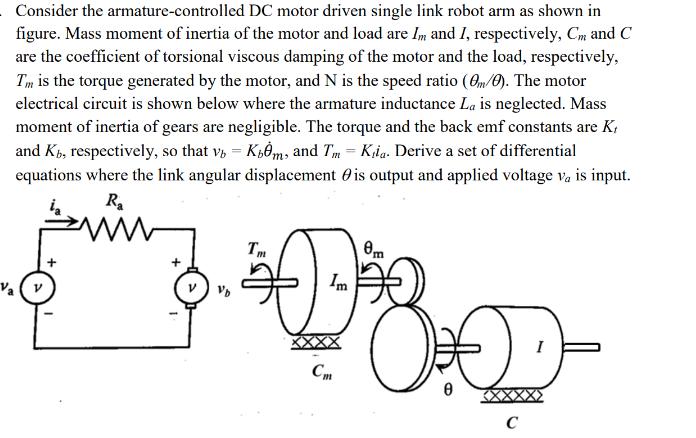
Consider the armature-controlled DC motor driven single link robot arm as shown in figure. Mass moment of inertia of the motor and load are Im and I, respectively, m and C are the coefficient of torsional viscous damping of the motor and the load, respectively, Tm is the torque generated by the motor, and N is the speed ratio (Om/0). The motor electrical circuit is shown below where the armature inductance La is neglected. Mass moment of inertia of gears are negligible. The torque and the back emf constants are K; and Kp, respectively, so that v, = Khm, and Tm = Kla. Derive a set of differential equations where the link angular displacement 0 is output and applied voltage va is input. Ra Va Im Cm C
Step by Step Solution
3.28 Rating (148 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts