

Question: ECH 4323 & 43231 Spring 2022 Name: Chemical Engineering Process Control Homework #5 1 Problem Score 2 3a 3b 4a 4b 4c 5a 5b 50
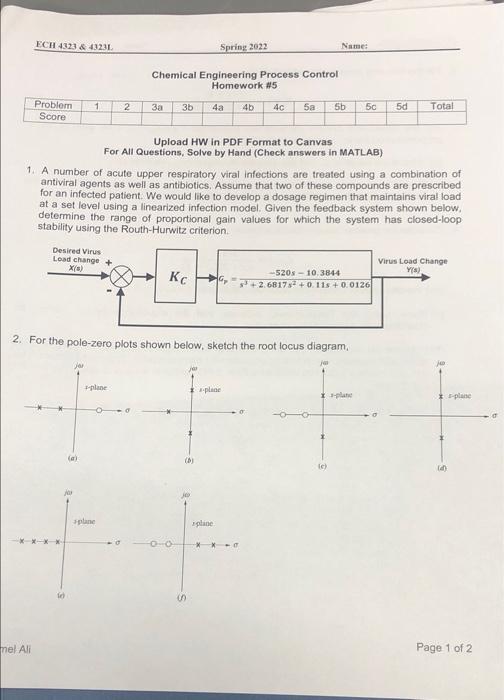
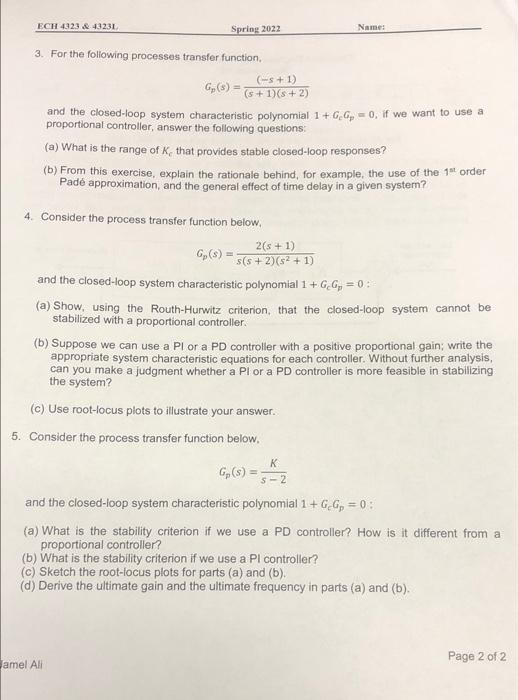
ECH 4323 & 43231 Spring 2022 Name: Chemical Engineering Process Control Homework #5 1 Problem Score 2 3a 3b 4a 4b 4c 5a 5b 50 5d Total Upload HW in PDF Format to Canvas For All Questions, Solve by Hand (Check answers in MATLAB) 1. A number of acute upper respiratory viral infections are treated using a combination of antiviral agents as well as antibiotics. Assume that two of these compounds are prescribed for an infected patient. We would like to develop a dosage regimen that maintains viral load at a set level using a linearized infection model. Given the feedback system shown below, determine the range of proportional gain values for which the system has closed-loop stability using the Routh-Hurwitz criterion Desired Virus Load change X(a) Virus Load Change Y? -520-10.3844 +2.68173* + 0.115 +0.0126 2. For the pole-zero plots shown below, sketch the root locus diagram plane place Islam -plane o c) plane place 0 0 id mel All Page 1 of 2 ECH432343231 Spring 2022 Name: 3. For the following processes transfer function (+1) Gr(s) - (s + 1)(+2) and the closed-loop system characteristic polynomial 1 + G9p = 0, if we want to use a proportional controller, answer the following questions: (a) What is the range of that provides stable closed-loop responses? (b) From this exercise, explain the rationale behind, for example, the use of the 1st order Pad approximation, and the general effect of time delay in a given system? 4. Consider the process transfer function below. 2(5 + 1) Gp($) = S(+2)(52 + 1) and the closed-loop system characteristic polynomial 1 + GGp = 0 (a) Show, using the Routh-Hurwitz criterion, that the closed-loop system cannot be stabilized with a proportional controller (b) Suppose we can use a Pl or a PD controller with a positive proportional gain; write the appropriate system characteristic equations for each controller. Without further analysis, can you make a judgment whether a Pl or a PD controller is more feasible in stabilizing the system? (c) Use root-locus plots to illustrate your answer. 5. Consider the process transfer function below. G (5) = K S-2 and the closed-loop system characteristic polynomial 1 + GGp = 0 : (a) What is the stability criterion if we use a PD controller? How is it different from a proportional controller? (b) What is the stability criterion if we use a PI controller? (c) Sketch the root-locus plots for parts (a) and (b). (d) Derive the ultimate gain and the ultimate frequency in parts (a) and (b). Page 2 of 2 amel All
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts