

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Frame Transformations 6. A robotic workcell with two robot manipulators and a camera is set up as shown in Figure 4 for vision-guided assembly
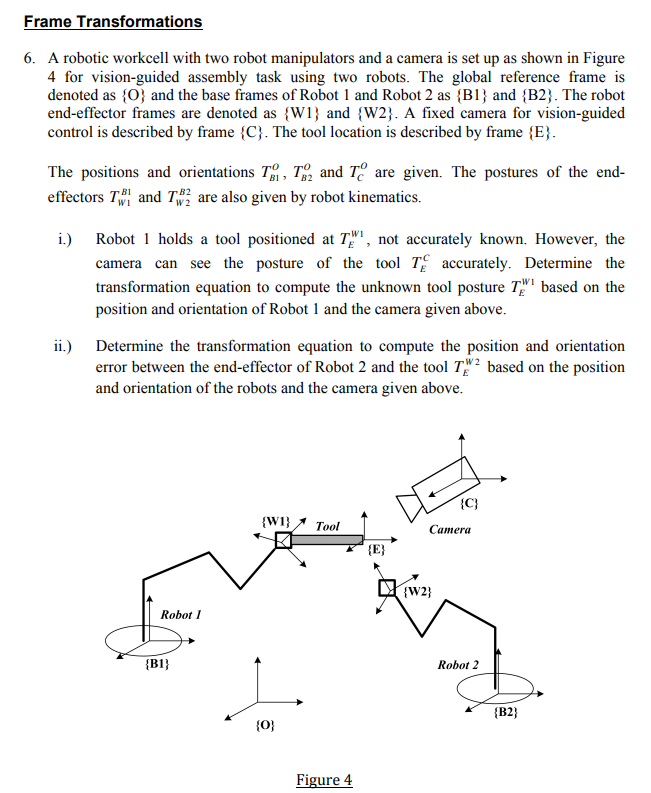
Frame Transformations 6. A robotic workcell with two robot manipulators and a camera is set up as shown in Figure 4 for vision-guided assembly task using two robots. The global reference frame is denoted as {O} and the base frames of Robot 1 and Robot 2 as {B1} and {B2}. The robot end-effector frames are denoted as {W1} and {W2}. A fixed camera for vision-guided control is described by frame {C}. The tool location is described by frame {E}. The positions and orientations T1, T2 and To are given. The postures of the end- effectors T1 and T2 are also given by robot kinematics. i.) Robot 1 holds a tool positioned at T, not accurately known. However, the camera can see the posture of the tool To accurately. Determine the transformation equation to compute the unknown tool posture T based on the position and orientation of Robot 1 and the camera given above. ii.) Determine the transformation equation to compute the position and orientation error between the end-effector of Robot 2 and the tool T2 based on the position and orientation of the robots and the camera given above. Robot 1 {B1} {W1} Tool {0} Figure 4 {C} Camera {E} {W2} Robot 2 {B2}
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Numerical Methods For Engineers
Authors: Steven C. Chapra, Raymond P. Canale
5th Edition
978-0071244299, 0071244298