

Question
I need help in MATLAB simulink tool. How do I use Simulink to create a control system to express a 2nd order differential equation? This
I need help in MATLAB simulink tool. How do I use Simulink to create a control system to express a 2nd order differential equation?
This is the diagram:
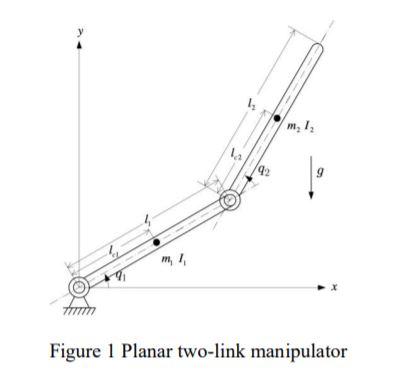
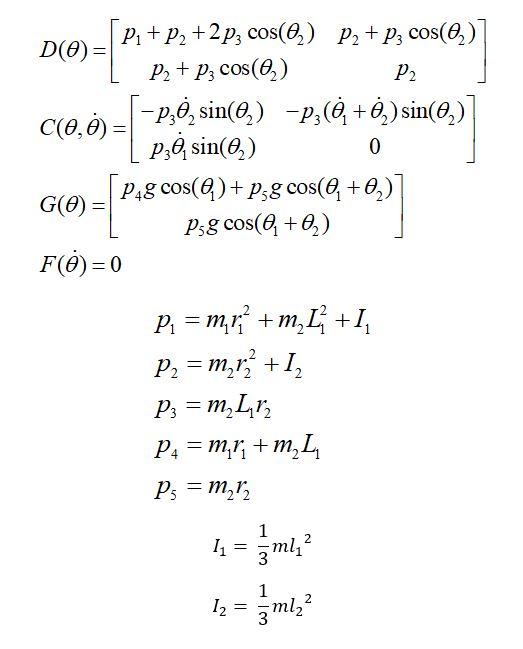
I'm given this equation:

, where matrix D, C, G and F can be represented by
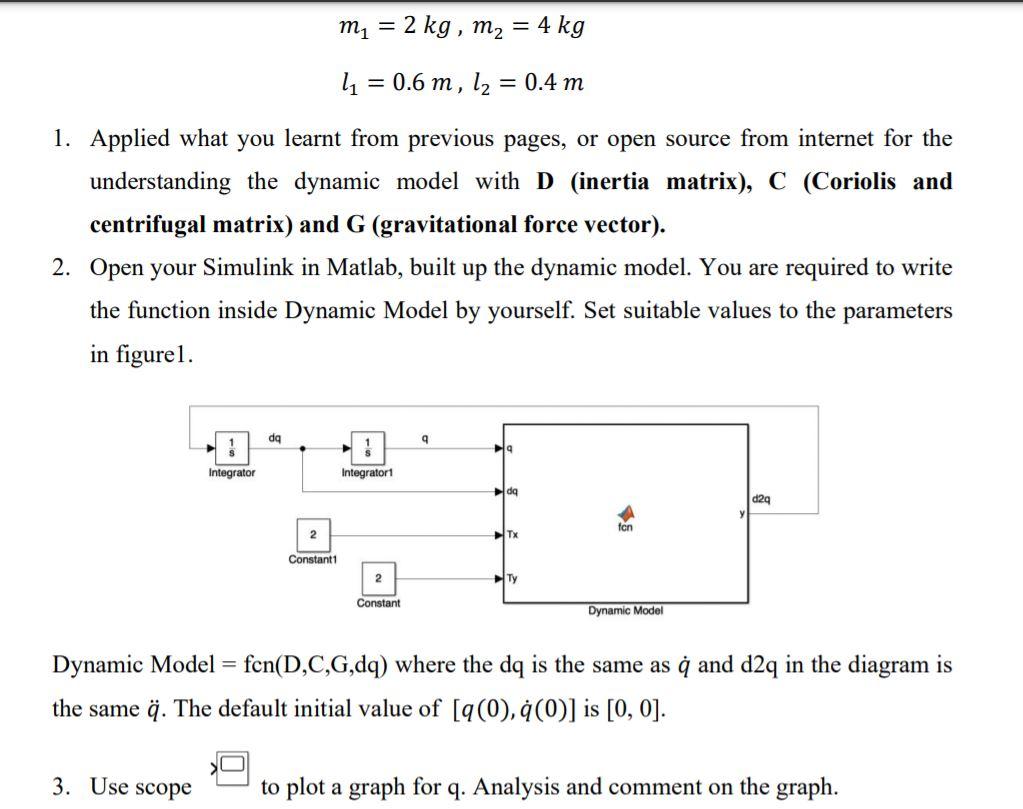
I'm supposed to design a control system that looks like this:
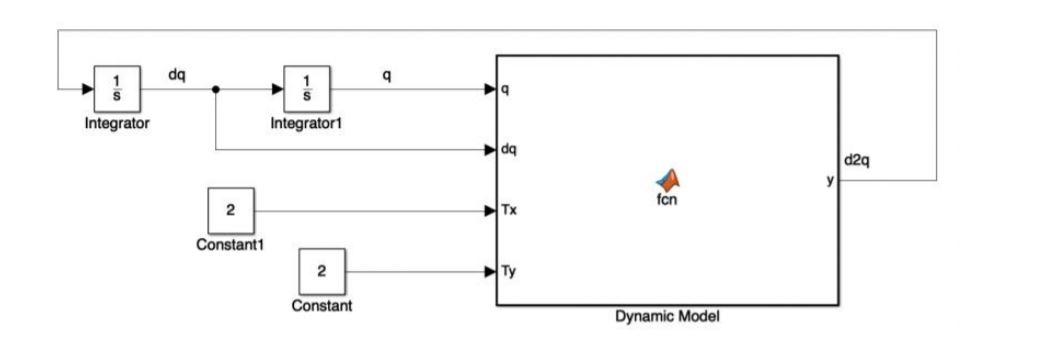
I am given that the dynamic model = fcn(D,C,G,dq) where the dq is the same as and d2q in the diagram is the same . The default initial value of [(0), (0)] is [0, 0].
My code is here:
function torque = fcn(D,C,G,theta,omega)
% length of the 2 robotic arms
l1 = 1;
l2=1;
r1=l1/2;
r2=l2/2;
% mass of the 2 robotic arms
m1= 5;
m2=5;
% moment of inertia of the 2 robotic arms
I1= (m1*l1^2)/3;
I2 = (m2*l2^2)/3;
p1= m1*r1^2+m2*l1^2+I1;
p2= m2*r2^2+ I2;
p3= m2*l1*r2;
p4= m1*r1+m2*l1;
p5= m2*r2;
% gravitational field strength
g = 9.81
D(theta) = [p1+p2+2*p3*cos(theta(2)) p2+p3*cos(theta(2)); p2+p3*cos(theta(2)) p2];
C(theta, omega) = [-p3*omega(2)*sin(theta(2)) -p3*(omega(1)+omega(2))*sin(theta(2)); p3*omega(1)*sin(theta(2)) 0];
G(theta) = [p4*g*theta((1))+ p5*g*cos(theta(1)+theta(2)); p5*g*cos(theta(1)+theta(2))];
F(omega) = 0
dthetadt = omega;
domegadt = D(theta)\(tau-F(omega)-G(theta)-C(theta,omega)*omega);
% Define Conditions
theta(1) = linspace(0, pi/2,10);
theta(2) = linspace(0,pi/2,10);
Is my code correct? And how to create a control system to represent the 2nd ode equation. Can someone help me? I'm pretty new to SimuLink and Matlab
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Lncs 5069 Scientific And Statistical Database Management 20th International Conference Ssdbm 2008 Hong Kong China July 9 11 2008 Proceedings
Authors: Bertram Ludascher ,Nikos Mamoulis
2008th Edition
3540694765, 978-3540694762