

Question: Pleas show all working step by step 1 ) Convert the following Laplace transfer functions to their discrete time equivalent ( perform the hand calculations
Pleas show all working step by step Convert the following Laplace transfer functions to their discrete time equivalent perform the hand calculations assuming that the transfer function is a model of the process dynamics and that there is a zero order hold device,
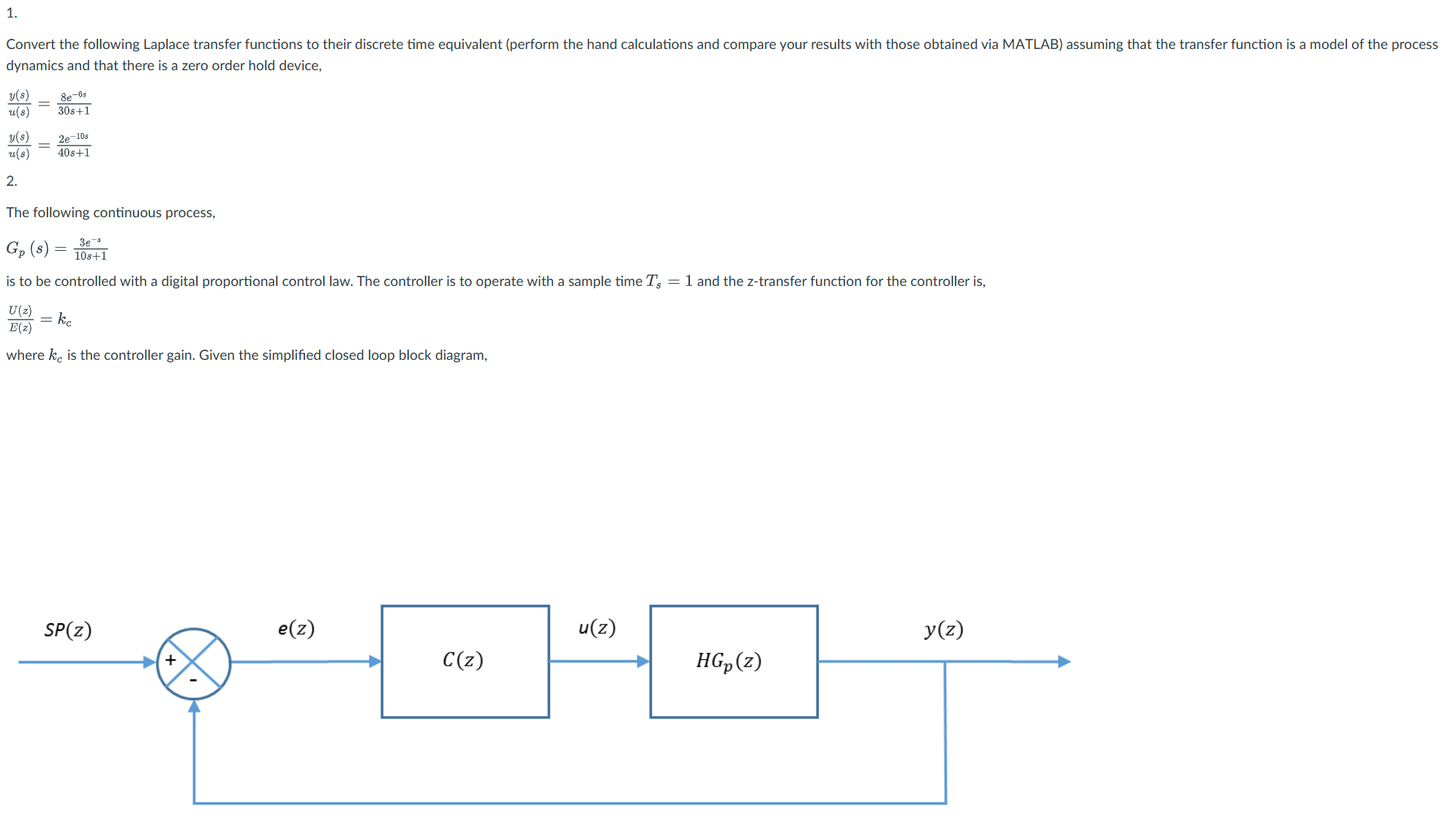
The following continuous process,
is to be controlled with a digital proportional control law. The controller is to operate with a sample time and the ztransfer function for the controller is
where is the controller gain. Given the simplified closed loop block diagram,a Derive the closed loop transfer function describing the response of the output
given a change in the set point
b If the controller gain
use the final value theorem to determine the numerical value of the offset given a unit step change in the set point
c Derive a transfer function describing the response of the manipulated variable
given a change in the set point
d Use the initial value theorem to determine the first initial value of the manipulated variable when the closed loop system has been subjected to a unit step change in set point. What happens to this value if the value of the controller gain is doubled?
The following continuous process,
Gpsess
is to be controlled with a digital proportional control law. The controller is to operate with a sample time Ts
and the ztransfer function for the controller is
UzEzkc
where kc is the controller gain.
a Derive the closed loop transfer function describing the response of the output Yz given a change in the set point SPz
b If the controller gain kc use the final value theorem to determine the numerical value of the offset given a unit step change in the set point
c Derive a transfer function describing the response of the manipulated variable Uz given a change in the set point
d Use the initial value theorem to determine the first initial value of the manipulated variable when the closed loop system has been subjected to a unit step change in set point.
e Use the final value theorem to determine the final value of the manipulated variable when the closed loop system has been subjected to a unit step change in set point.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock