

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Please give me the mathmatical answers for all below questions (a, b, c, d,e) noting that a=1 , b=8 as well as please advise me
Please give me the mathmatical answers for all below questions (a, b, c, d,e) noting that a=1 , b=8 as well as please advise me about the matlab code to solve all questions, thanks 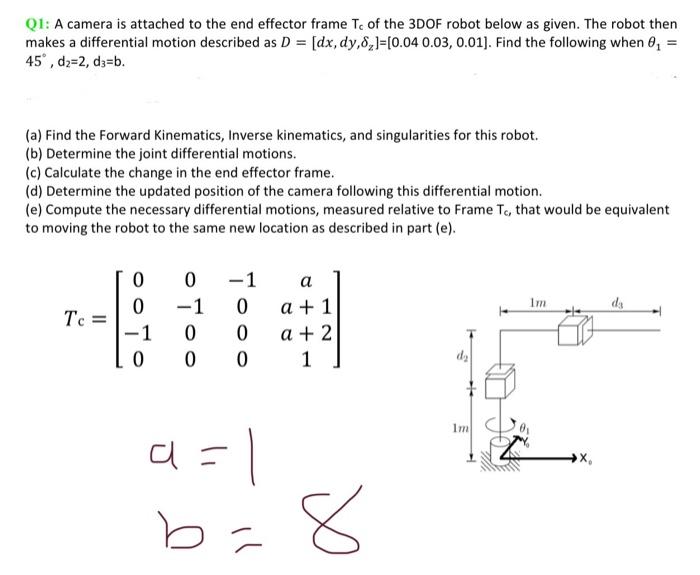
Q1: A camera is attached to the end effector frame Tc of the 3DOF robot below as given. The robot then makes a differential motion described as D=[dx,dy,z]=[0.040.03,0.01]. Find the following when 1= 45,d2=2,d3=b. (a) Find the Forward Kinematics, Inverse kinematics, and singularities for this robot. (b) Determine the joint differential motions. (c) Calculate the change in the end effector frame. (d) Determine the updated position of the camera following this differential motion. (e) Compute the necessary differential motions, measured relative to FrameTc, that would be equivalent to moving the robot to the same new location as described in part (e). Tc=001001001000aa+1a+21 Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Vector Mechanics for Engineers Statics and Dynamics
Authors: Ferdinand Beer, E. Russell Johnston, Jr., Elliot Eisenberg, William Clausen, David Mazurek, Phillip Cornwell
8th Edition
73212229, 978-0073212227