

Question
Program mbot (mcore) Robot using mblock 3.4.11 (version) I am required to make the robot this: Create a piece of code that makes the robot
Program mbot (mcore) Robot using mblock 3.4.11 (version) I am required to make the robot this: "Create a piece of code that makes the robot drive straight until it gets within 10 cm of an object then stop until that object moves again." I need a screen shot how to plug those codes please and we are using "Arduino mode" since I am unable to make it work and it only makes a horrible sound. This is what I attempted and failed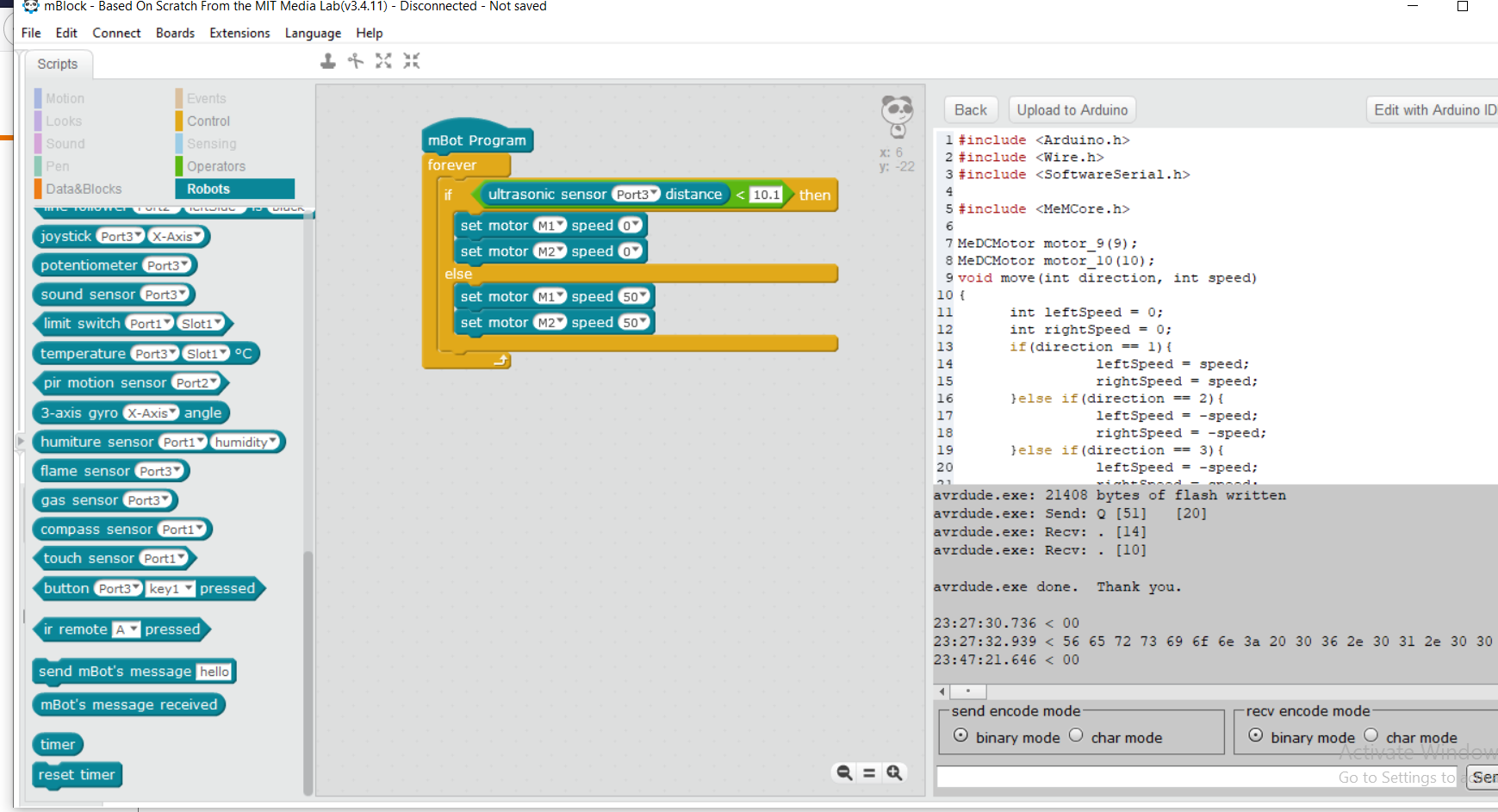
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database Systems For Advanced Applications 16th International Conference Dasfaa 2011 International Workshops Gdb Sim3 Flashdb Snsmw Damen Dqis Hong Kong China April 2011 Proceedings Lncs 6637
Authors: Jianliang Xu ,Ge Yu ,Shuigeng Zhou ,Rainer Unland
2011th Edition
3642202438, 978-3642202438