

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Suppose you are given a linear, time-invariant (LTI) system: x = Ax+ Bu (1) which is sampled every T seconds. Denote x(kT) by xk.
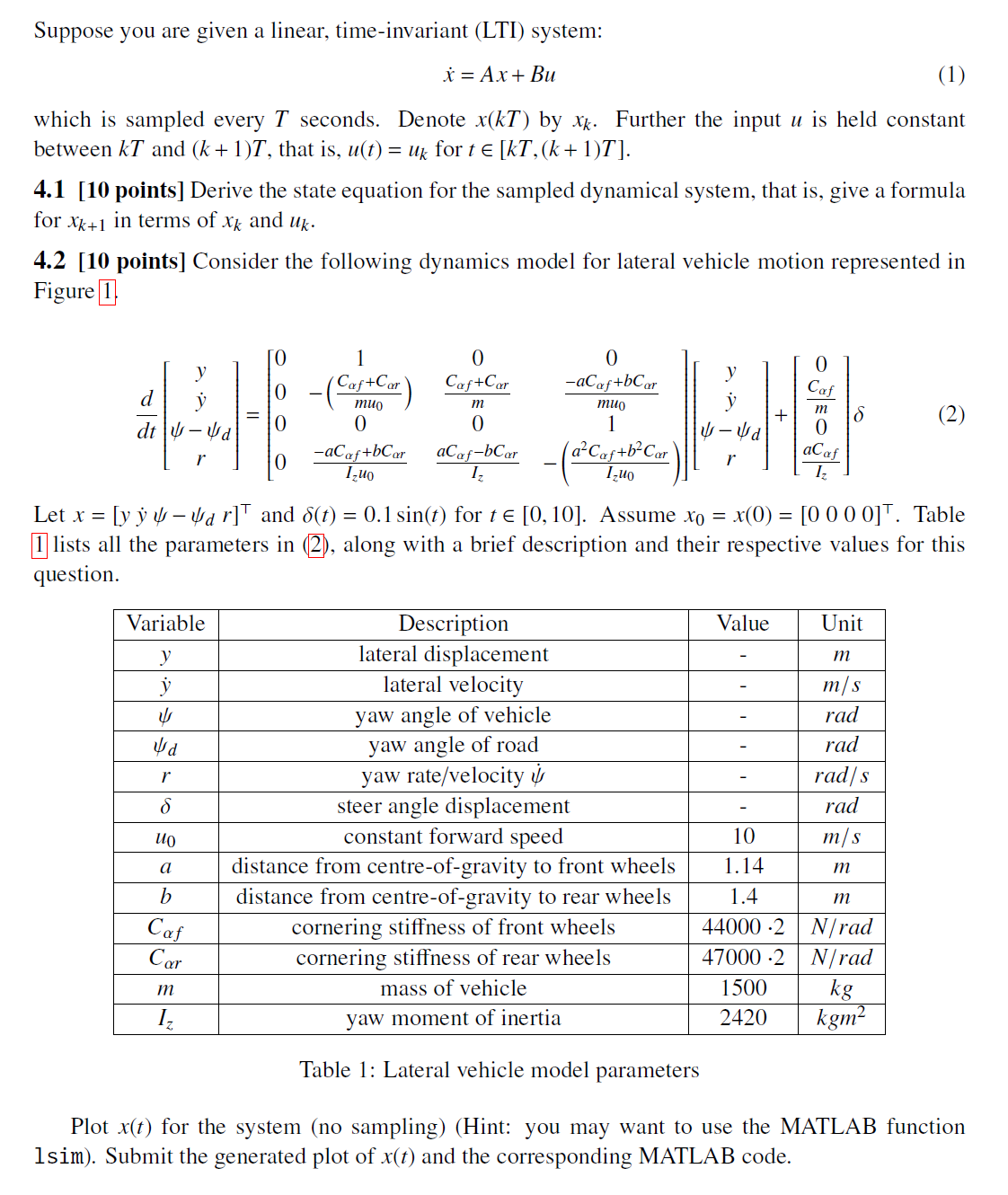
Suppose you are given a linear, time-invariant (LTI) system: x = Ax+ Bu (1) which is sampled every T seconds. Denote x(kT) by xk. Further the input u is held constant between kT and (k+1)T, that is, u(t) = uk for t = [kT,(k+1)T]. 4.1 [10 points] Derive the state equation for the sampled dynamical system, that is, give a formula for xk+1 in terms of xk and uk. 4.2 [10 points] Consider the following dynamics model for lateral vehicle motion represented in Figure 1 dt-d Caf (2) aCaf -*** Caf+Car Caf+Car -aCaf+bCar -aCaf+bCar aCaf-bCar (aCaf+b Car Izuo Izuo Let x = [yyar] and 8(t) = 0.1 sin(t) for t [0, 10]. Assume x0 = x(0) = [0000]. Table lists all the parameters in (2), along with a brief description and their respective values for this question. Variable y 4 Vd r Description lateral displacement lateral velocity yaw angle of vehicle yaw angle of road Value Unit m m/s rad rad yaw rate/velocity rad/s steer angle displacement - rad uo constant forward speed 10 m/s a distance from centre-of-gravity to front wheels 1.14 m b distance from centre-of-gravity to rear wheels 1.4 m Caf cornering stiffness of front wheels 44000 2 N/rad Car cornering stiffness of rear wheels 47000 2 N/rad m mass of vehicle 1500 kg Iz yaw moment of inertia 2420 kgm Table 1: Lateral vehicle model parameters Plot x(t) for the system (no sampling) (Hint: you may want to use the MATLAB function 1sim). Submit the generated plot of x(t) and the corresponding MATLAB code.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Materials Science and Engineering An Integrated Approach
Authors: David G. Rethwisch
4th Edition
1118214226, 1118061608, 9781118214220, 978-1118061602