

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
There is a C++ lab, do any experts could finish all the TODO of the skeleton code? Thank you so much!!!! Skeleton Code #include #include
There is a C++ lab, do any experts could finish all the "TODO" of the skeleton code? Thank you so much!!!!

Skeleton Code
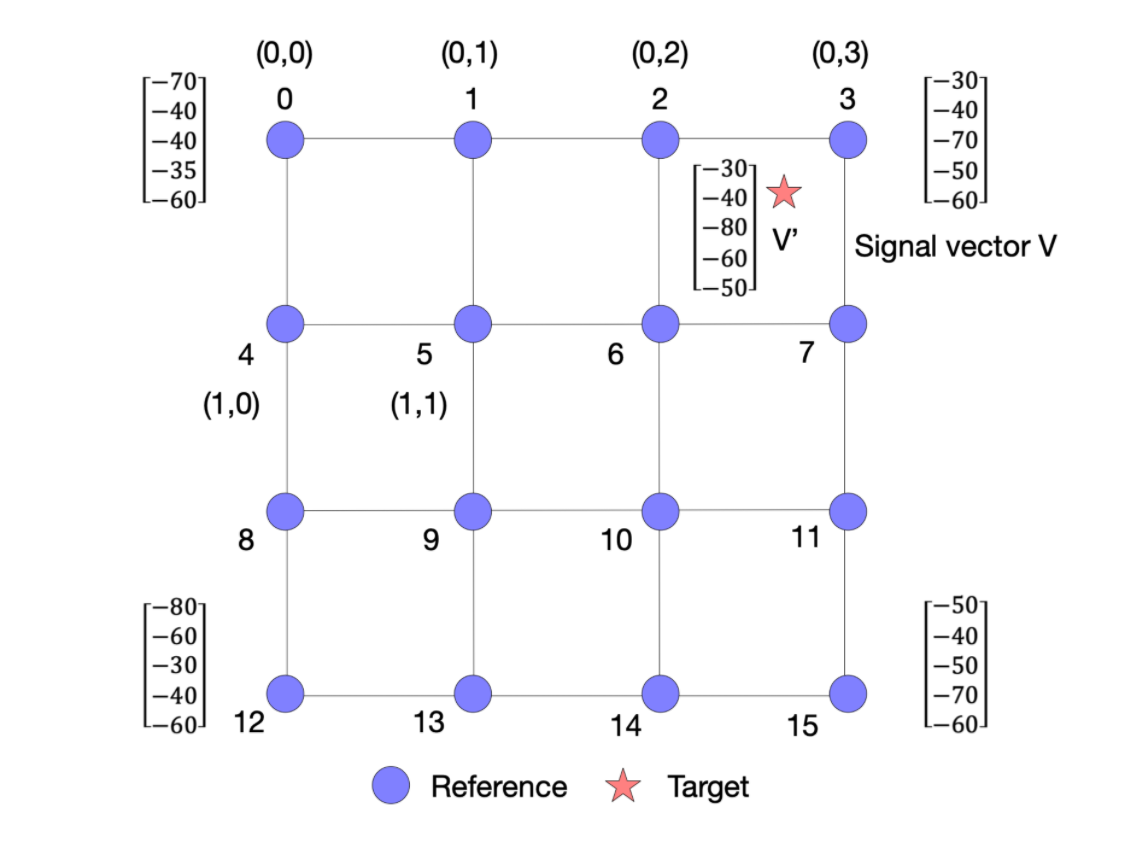
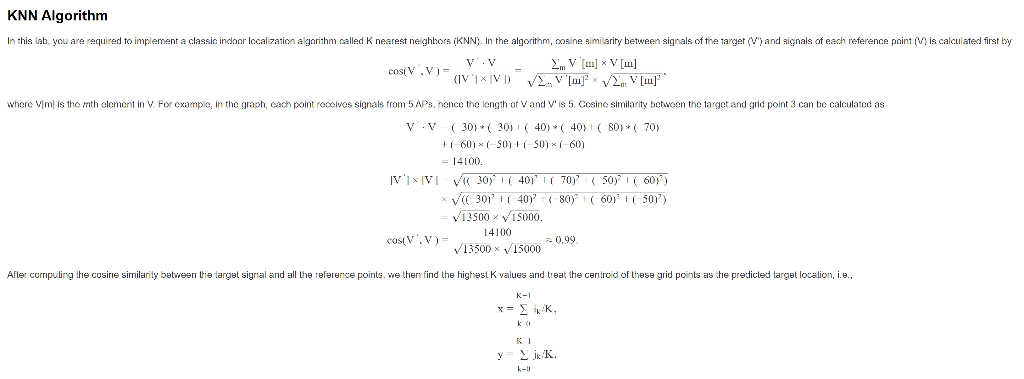
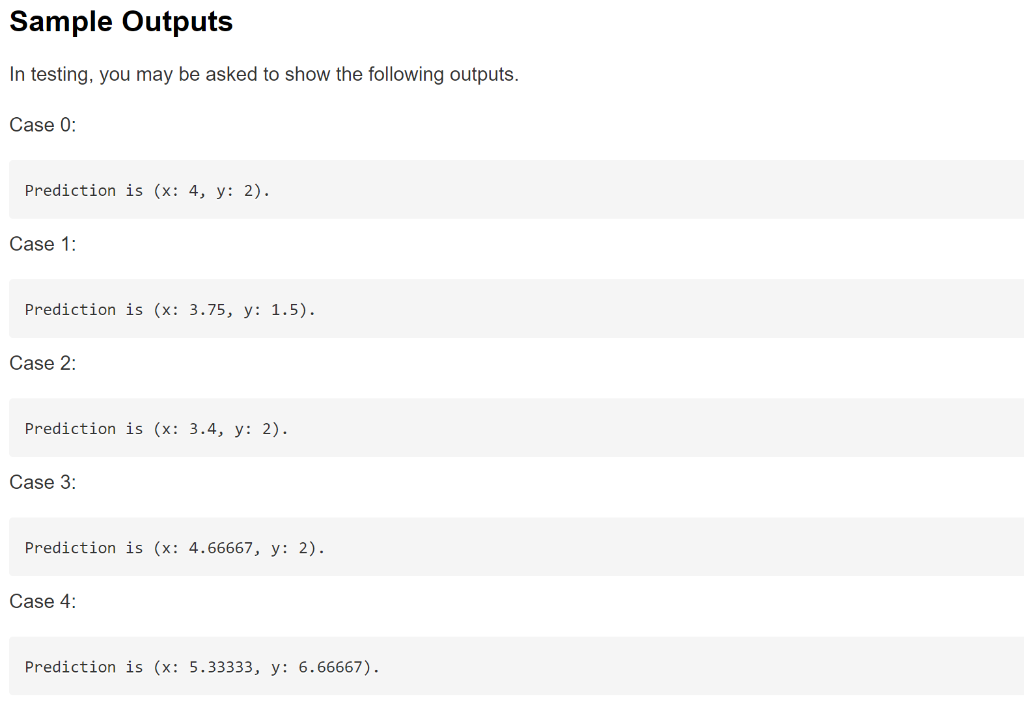
#include#include using namespace std; const int AP_NUM = 5; const int MAX_K = 5; const int MAX_GRID_PTS_PER_LINE = 8; const int TOTAL_GRID = MAX_GRID_PTS_PER_LINE * MAX_GRID_PTS_PER_LINE; // Square grid. // Calculate cosine similarity between signals from a SINGLE grid point (reference) and the target. double cosine_similarity(const double ref_signal[], const double target_signal[]); // Find top k nearest neighbors of target from all grid points (references) using cosine similarity. void k_nearest_neighbor(int knn[], const double similarity[], int k, int current_total_grid_pts); // Convert grid index to coordinates. A helper function that can be used in cetnroid calculation. void convert2D(int index, int& i, int& j, int grid_pts_per_line); // Find centroid coordinates of k nearest neighbors. void centroid(int knn[], double& centroid_x, double& centroid_y, int k, int grid_pts_per_line); // Find the target location with reference point signals and target signals. void do_localization(const double ref_signals[], const double target_signals[], int k, int grid_pts_per_line); int main() { int choice; int k, grid_pts_per_line; double ref_signals_all[AP_NUM * 64] = {-162.5,-175.504,-101.438,-42.6599,-80.398,-158.5,-152.483,-85.6827,-50.4156,-95.4192,-156.5,-131.461,-71.927,-60.1713,-112.44,-156.5,-112.44,-60.1713,-71.927,-131.461,-158.5,-95.4192,-50.4156,-85.6827,-152.483,-162.5,-80.398,-42.6599,-101.438,-175.504,-168.5,-67.3769,-36.9042,-119.194,-200.525,-176.5,-56.3558,-33.1485,-138.95,-227.546,-138.5,-165.323,-113.619,-54.8402,-70.2177,-134.5,-142.302,-97.8631,-62.5959,-85.2388,-132.5,-121.281,-84.1073,-72.3516,-102.26,-132.5,-102.26,-72.3516,-84.1073,-121.281,-134.5,-85.2388,-62.5959,-97.863,-142.302,-138.5,-70.2177,-54.8402,-113.619,-165.323,-144.5,-57.1965,-49.0845,-131.374,-190.344,-152.5,-46.1754,-45.3288,-151.13,-217.366,-116.5,-157.143,-127.799,-69.0206,-62.0373,-112.5,-134.122,-112.043,-76.7763,-77.0585,-110.5,-113.101,-98.2877,-86.532,-94.0796,-110.5,-94.0796,-86.532,-98.2877,-113.101,-112.5,-77.0585,-76.7763,-112.043,-134.122,-116.5,-62.0373,-69.0206,-127.799,-157.143,-122.5,-49.0162,-63.2649,-145.555,-182.164,-130.5,-37.9951,-59.5092,-165.311,-209.185,-96.5,-150.963,-143.979,-85.2009,-55.857,-92.5,-127.942,-128.224,-92.9566,-70.8781,-90.5,-106.92,-114.468,-102.712,-87.8993,-90.5,-87.8993,-102.712,-114.468,-106.92,-92.5,-70.8781,-92.9566,-128.224,-127.942,-96.5,-55.857,-85.2009,-143.979,-150.963,-102.5,-42.8359,-79.4452,-161.735,-175.984,-110.5,-31.8147,-75.6895,-181.491,-203.005,-78.5,-146.782,-162.16,-103.381,-51.6767,-74.5,-123.761,-146.404,-111.137,-66.6978,-72.5,-102.74,-132.648,-120.893,-83.7189,-72.5,-83.7189,-120.893,-132.648,-102.74,-74.5,-66.6978,-111.137,-146.404,-123.761,-78.5,-51.6767,-103.381,-162.16,-146.782,-84.5,-38.6555,-97.6255,-179.915,-171.803,-92.5,-27.6344,-93.8698,-199.671,-198.825,-62.5,-144.602,-182.34,-123.562,-49.4963,-58.5,-121.581,-166.584,-131.317,-64.5174,-56.5,-100.56,-152.829,-141.073,-81.5386,-56.5,-81.5386,-141.073,-152.829,-100.56,-58.5,-64.5174,-131.317,-166.584,-121.581,-62.5,-49.4963,-123.562,-182.34,-144.602,-68.5,-36.4752,-117.806,-200.096,-169.623,-76.5,-25.4541,-114.05,-219.852,-196.644,-48.5,-144.422,-204.52,-145.742,-49.316,-44.5,-121.4,-188.765,-153.498,-64.3371,-42.5,-100.379,-175.009,-163.253,-81.3582,-42.5,-81.3582,-163.253,-175.009,-100.379,-44.5,-64.3371,-153.498,-188.765,-121.4,-48.5,-49.316,-145.742,-204.52,-144.422,-54.5,-36.2948,-139.986,-222.276,-169.443,-62.5,-25.2737,-136.231,-242.032,-196.464,-36.5,-146.241,-228.701,-169.922,-51.1356,-32.5,-123.22,-212.945,-177.678,-66.1568,-30.5,-102.199,-199.189,-187.434,-83.1779,-30.5,-83.1779,-187.434,-199.189,-102.199,-32.5,-66.1568,-177.678,-212.945,-123.22,-36.5,-51.1356,-169.922,-228.701,-146.241,-42.5,-38.1145,-164.167,-246.456,-171.262,-50.5,-27.0934,-160.411,-266.212,-198.284}; double target_signals[AP_NUM] = {-78.17,-10.3314,-144.037,-294.51,-253.802}; while (true) { cout > choice; // Initialization. switch (choice) { case 0: k = 3; grid_pts_per_line = 5; break; case 1: k = 4; grid_pts_per_line = 5; break; case 2: k = 5; grid_pts_per_line = 5; break; case 3: k = 3; grid_pts_per_line = 6; break; case 4: k = 3; grid_pts_per_line = 8; break; default: cout (already included) to calculate the square root of a value, e.g., a = sqrt(100), then a = 10. */ return 0; } void k_nearest_neighbor(int knn[], const double similarity[], int k, int current_total_grid_pts) { /* TODO 2: Find top k nearest neighbors of the target from all grid points (references) using cosine similarity. knn[k]: top K indices with largest similarity. similarity[total_grid_pts]: cosine similarity between each grid point (reference) and the target. */ return; } void convert2D(const int index, int& i, int& j, int grid_pts_per_line) { /* TODO 3: Convert grid index to coordinates. A helper function that can be used in cetnroid calculation. It is a squared grid. X coordinate increases first until a line is filled. */ return; } void centroid(int knn[], double& centroid_x, double& centroid_y, int k, int grid_pts_per_line) { int ref_i[MAX_K], ref_j[MAX_K]; for (int m=0; m Lab 4: Indoor Localization with WiFi signals Introduction In this lab, we are going to implement a simple localization algorithm with 1D array that we have learned. Overall Description While GPS works well outdoors, it usually fails to get indoor locations due to blockage of the buildings. Indoor localization based on WiFi signals has emerged as a promising technique since wireless APs (or routers) are prevalent in most indoor settings including commercial centers, airports and hospitals, etc. A simple way to do localization with WiFi is through fingerprinting. As shown in the figure below, the area is divided into square regular grid points labeled as (i,j), where i is the row index and j is the column index. Each grid point, also known as a reference point, has a unique "fingerprint" given by its location point (i,j) and its corresponding collected signal vector V from different WiFi access points (APs). In the figure, there are 5 AP signals at each grid point. The object to be localized is called "target". Given the signal vector V' collected by the target, we would like to predict or estimate its location (x, y). You may assume in this lab that the vectors V and V' are all of the same dimension, and the area is a square grid of different size. Each grid point can be alternatively labeled with an integral index. We show in the figure the grid index of each location. It is straightforward to convert a grid index to its (i,j) location, as indicated by the first 6 entries of the grid points. If grid_index = 1, we have (i,j)=(0,1); if grid_index = 4, (i,j) = (1,0), etc. (0,0) 0 (0,1) 1 (0,2) 2 (0,3) 3 -70 -40 -40 -35 -60 -30 -40 -70 -50 -60 -307 -40 -80 -60 50 Signal vector v 4 5 6 7 (1,0) (1,1) 8 10 11 -801 -60 -30 -40 -60 -50 -40 -50 -70 -60 12 13 14 15 Reference Target KNN Algorithm In this lah, you are required to implement a classic indoor localization algorithm called K nearest neighbors (KNN). In the algorithm, cosine similarity between signals of the target (V) and signals of each reference point (V) is calculated first by V.V COSVV V [m] x V [LU] (IV|XVD) 2. V '[m] V...V[m]? where vim is the mth element in V. For example, in the graph, cach point reocives signals from 5 APs, hence the length of Vand Vis S. Cesine similarity between the target and grid point 3 can be calculated as V.V (30)*( 30)( 40)*( 40) (80)*( 70) +60)*(-50)+(-50)*(-60) 14100 V|XVI-307 ( 401( 70) Soy ( 601 ) VI 301 +( 407 +(80) + ( 601 +507) 13500 x V 15000. 14100 COSV.V) 0.99 V13500 15000 After computing the cosire similarity between the target signal and all the reference points, we then find the highest K values and treat the centroid of these grid points as the predicted targat location, i.8., R-1 x= SIKK KI _is K, To Do Please treat grid index as 1D array and use a mapping function, convert2D, to convert the indices to their corresponding (i, j) coordinates. The sample code is provided here (new version here). You need to complete three functions stated in the following. // Calculate cosine similarity between signals from a SINGLE grid point (reference) and the target. double cosine_similarity(const double ref_signal[], const double target_signal[]); // Find top k nearest neighbors of target from all grid points (references) using cosine similarity. void k_nearest_neighbor(int knn[], const double similarity[], int k, int total_grid_pts); // Convert grid index to coordinates. A helper function that can be used in centroid calculation. void convert2D(int index, int& i, int& j, int grid_pts_per_line); Sample Outputs In testing, you may be asked to show the following outputs. Case 0: Prediction is (x: 4, y: 2). Case 1: Prediction is (x: 3.75, y: 1.5). Case 2: Prediction is (x: 3.4, y: 2). Case 3: Prediction is (x: 4.66667, y: 2). Case 4: Prediction is (x: 5.33333, y: 6.66667). Lab 4: Indoor Localization with WiFi signals Introduction In this lab, we are going to implement a simple localization algorithm with 1D array that we have learned. Overall Description While GPS works well outdoors, it usually fails to get indoor locations due to blockage of the buildings. Indoor localization based on WiFi signals has emerged as a promising technique since wireless APs (or routers) are prevalent in most indoor settings including commercial centers, airports and hospitals, etc. A simple way to do localization with WiFi is through fingerprinting. As shown in the figure below, the area is divided into square regular grid points labeled as (i,j), where i is the row index and j is the column index. Each grid point, also known as a reference point, has a unique "fingerprint" given by its location point (i,j) and its corresponding collected signal vector V from different WiFi access points (APs). In the figure, there are 5 AP signals at each grid point. The object to be localized is called "target". Given the signal vector V' collected by the target, we would like to predict or estimate its location (x, y). You may assume in this lab that the vectors V and V' are all of the same dimension, and the area is a square grid of different size. Each grid point can be alternatively labeled with an integral index. We show in the figure the grid index of each location. It is straightforward to convert a grid index to its (i,j) location, as indicated by the first 6 entries of the grid points. If grid_index = 1, we have (i,j)=(0,1); if grid_index = 4, (i,j) = (1,0), etc. (0,0) 0 (0,1) 1 (0,2) 2 (0,3) 3 -70 -40 -40 -35 -60 -30 -40 -70 -50 -60 -307 -40 -80 -60 50 Signal vector v 4 5 6 7 (1,0) (1,1) 8 10 11 -801 -60 -30 -40 -60 -50 -40 -50 -70 -60 12 13 14 15 Reference Target KNN Algorithm In this lah, you are required to implement a classic indoor localization algorithm called K nearest neighbors (KNN). In the algorithm, cosine similarity between signals of the target (V) and signals of each reference point (V) is calculated first by V.V COSVV V [m] x V [LU] (IV|XVD) 2. V '[m] V...V[m]? where vim is the mth element in V. For example, in the graph, cach point reocives signals from 5 APs, hence the length of Vand Vis S. Cesine similarity between the target and grid point 3 can be calculated as V.V (30)*( 30)( 40)*( 40) (80)*( 70) +60)*(-50)+(-50)*(-60) 14100 V|XVI-307 ( 401( 70) Soy ( 601 ) VI 301 +( 407 +(80) + ( 601 +507) 13500 x V 15000. 14100 COSV.V) 0.99 V13500 15000 After computing the cosire similarity between the target signal and all the reference points, we then find the highest K values and treat the centroid of these grid points as the predicted targat location, i.8., R-1 x= SIKK KI _is K, To Do Please treat grid index as 1D array and use a mapping function, convert2D, to convert the indices to their corresponding (i, j) coordinates. The sample code is provided here (new version here). You need to complete three functions stated in the following. // Calculate cosine similarity between signals from a SINGLE grid point (reference) and the target. double cosine_similarity(const double ref_signal[], const double target_signal[]); // Find top k nearest neighbors of target from all grid points (references) using cosine similarity. void k_nearest_neighbor(int knn[], const double similarity[], int k, int total_grid_pts); // Convert grid index to coordinates. A helper function that can be used in centroid calculation. void convert2D(int index, int& i, int& j, int grid_pts_per_line); Sample Outputs In testing, you may be asked to show the following outputs. Case 0: Prediction is (x: 4, y: 2). Case 1: Prediction is (x: 3.75, y: 1.5). Case 2: Prediction is (x: 3.4, y: 2). Case 3: Prediction is (x: 4.66667, y: 2). Case 4: Prediction is (x: 5.33333, y: 6.66667)
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Relational Database And SQL
Authors: Lucy Scott
3rd Edition
1087899699, 978-1087899695