

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
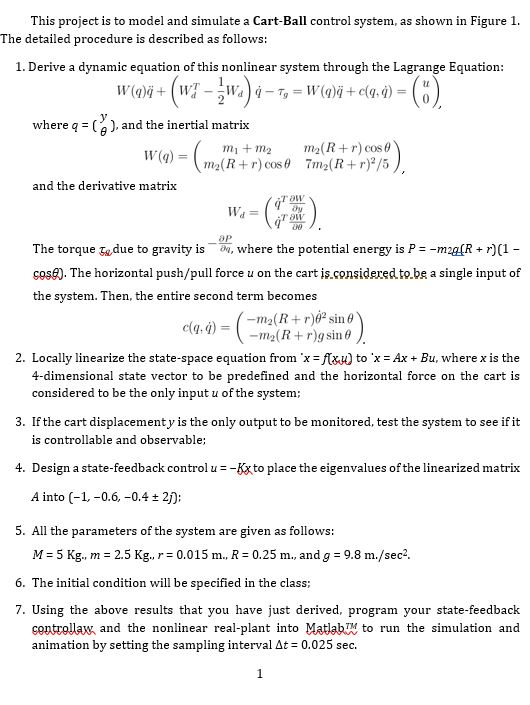
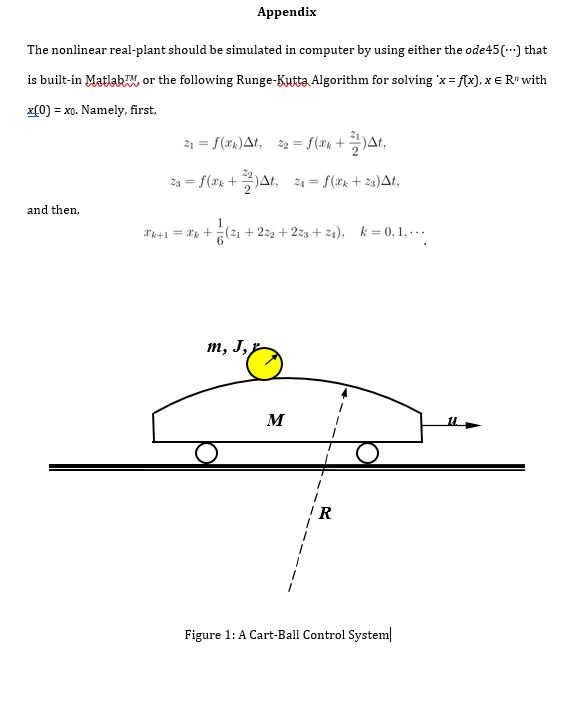
This project is to model and simulate a Cart-Ball control system, as shown in Figure 1 The detailed procedure is described as follows: 1. Derive
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Machine Learning And Knowledge Discovery In Databases European Conference Ecml Pkdd 2017 Skopje Macedonia September 18 22 2017 Proceedings Part 3 Lnai 10536
Authors: Yasemin Altun ,Kamalika Das ,Taneli Mielikainen ,Donato Malerba ,Jerzy Stefanowski ,Jesse Read ,Marinka Zitnik ,Michelangelo Ceci ,Saso Dzeroski
1st Edition
3319712721, 978-3319712727