

Question: Transfer the values from Question 1a into Experiment 17B. Set the velocity feed-forward gain to 0.5 and the acceleration feed-forward gain to zero. Reduce position
Transfer the values from Question 1a into Experiment 17B.
Set the velocity feed-forward gain to 0.5 and the acceleration feed-forward gain to zero. Reduce position loop gain to eliminate the overshoot caused by velocity feed-forward.
a. What are the values of KVF and KPP?
b. What is the position loop bandwidth with feed-forward?
data from question 1a
a. What are the values of KVP, KVI, and KPP?
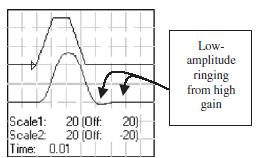
#H+ Scale1: 20 (Off: 20) Scale2 20 (Off: -20) Time: 0.01 Low- amplitude ringing from high gain
Step by Step Solution
★★★★★
3.40 Rating (144 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock