

Question: A robotic manipulator together with a cascade PI controller has a transfer function (Low, 2005) Assume the robots joint will be controlled in the configuration
A robotic manipulator together with a cascade PI controller has a transfer function (Low, 2005)
![]()
Assume the robot’s joint will be controlled in the configuration shown in Figure P8.3.
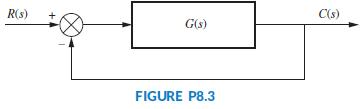
a. Find the value of KI that will result in ess = 2% for a parabolic input.
b. Using the value of KI found in Part a, plot the root locus of the system as a function of KP.
c. Find the value of KP that will result in a real pole at -1. Find the location of the other two poles.
K1 G(s) = (Kp 48, 500 %3D s2 + 2.89s
Step by Step Solution
★★★★★
3.40 Rating (159 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock