

A technique to control the steering of a vehicle that follows a line located in the middle
Question:
A technique to control the steering of a vehicle that follows a line located in the middle of a lane is to define a look-ahead point and measure vehicle deviations with respect to the point. A linearized model for such a vehicle is
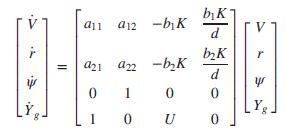
where V = vehicle’s lateral velocity, r = vehicle’s yaw velocity, ψ = vehicle’s yaw position, and Yg = the y-axis coordinate of the vehicle’s center of gravity. K is a parameter to be varied depending upon trajectory changes. In a specific vehicle traveling at a speed of U = -10m/sec, the parameters are a11 = -11.6842; a12 = 6.7632; b1 = -61.5789; a21 = -3.5143; a22 = 24:0257, and b2 = 66.8571. d = 5 m is the look-ahead distance (Ünyeliogl̆ u, 1997).Assuming the vehicle will be controlled in closed loop:
a. Find the system’s characteristic equation as a function of K.
b. Find the system’s root locus as K is varied.
c. Using the root locus found in Part b, show that the system will be unstable for all values K.
Step by Step Answer:



