

Question: Let us define a gridworld MDP , depicted in Figure 2 . The states are grid squares, identified by their row and column number (
Let us define a gridworld MDP depicted in Figure The states are grid squares, identified
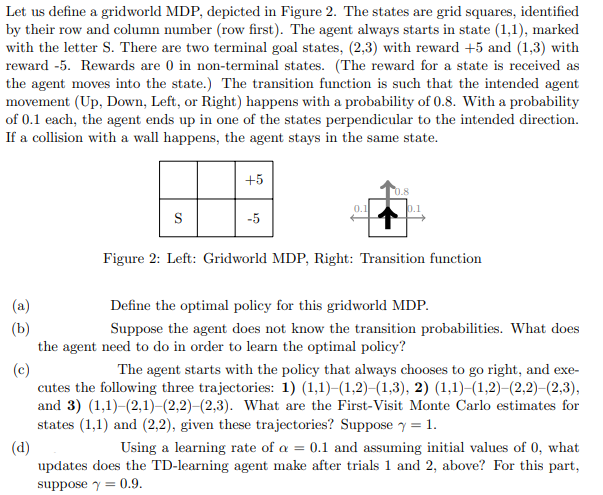
by their row and column number row first The agent always starts in state marked
with the letter S There are two terminal goal states, with reward and with
reward Rewards are in nonterminal states. The reward for a state is received as
the agent moves into the state. The transition function is such that the intended agent
movement Up Down, Left, or Right happens with a probability of With a probability
of each, the agent ends up in one of the states perpendicular to the intended direction.
If a collision with a wall happens, the agent stays in the same state.
Figure : Left: Gridworld MDP Right: Transition function
a
Define the optimal policy for this gridworld MDP
b
Suppose the agent does not know the transition probabilities. What does
the agent need to do in order to learn the optimal policy?
c
The agent starts with the policy that always chooses to go right, and exe
cutes the following three trajectories:
and What are the FirstVisit Monte Carlo estimates for
states and given these trajectories? Suppose
d
Using a learning rate of and assuming initial values of what
updates does the TDlearning agent make after trials and above? For this part,
suppose
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock