

Question: 1 Consider a mobile robot moving on a horizontal surface. Suppose that the robot can execute two kinds of motions: Rolling forward a specified
1 Consider a mobile robot moving on a horizontal surface. Suppose that the robot can execute two kinds of motions:
• Rolling forward a specified distance.
• Rotating in place through a specified angle.
The state of such a robot can be characterized in terms of three parameters hx, y, , the xcoordinate and y-coordinate of the robot (more precisely, of its center of rotation) and the robot’s orientation expressed as the angle from the positive x direction. The action “Roll(D)”
has the effect of changing state hx, y, to hx + Dcos(), y + Dsin(), i, and the action Rotate() has the effect of changing state hx, y, i to hx, y, + i.
a. Suppose that the robot is initially at h0, 0, 0i and then executes the actions Rotate(60◦), Roll(1), Rotate(25◦), Roll(2). What is the final state of the robot?
b. Now suppose that the robot has imperfect control of its own rotation, and that, if it attempts to rotate by , it may actually rotate by any angle between −10◦ and +10◦.
In that case, if the robot attempts to carry out the sequence of actions in (A), there is a range of possible ending states. What are the minimal and maximal values of the x-coordinate, the y-coordinate and the orientation in the final state?
c. Let us modify the model in (B) to a probabilistic model in which, when the robot attempts to rotate by , its actual angle of rotation follows a Gaussian distribution with mean and standard deviation 10◦. Suppose that the robot executes the actions Rotate(90◦), Roll(1). Give a simple argument that
(a) the expected value of the location at the end is not equal to the result of rotating exactly 90◦ and then rolling forward 1 unit, and
(b) that the distribution of locations at the end does not follow a Gaussian.
(Do not attempt to calculate the true mean or the true distribution.)
The point of this exercise is that rotational uncertainty quickly gives rise to a lot of positional uncertainty and that dealing with rotational uncertainty is painful, whether uncertainty is treated in terms of hard intervals or probabilistically, due to the fact that the relation between orientation and position is both non-linear and non-monotonic.
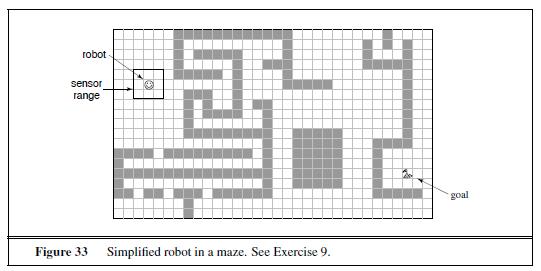
robot sensor range Figure 33 Simplified robot in a maze. See Exercise 9. goal
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts