New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
mechanical vibration analysis
Mechanical Vibrations 6th Edition Singiresu S Rao - Solutions
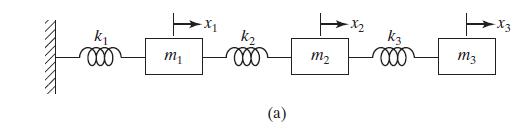
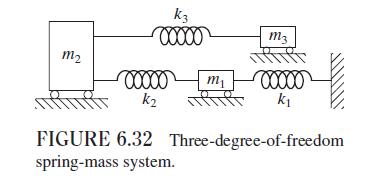
Find the natural frequencies and mode shapes of the system considered in Problem 6.27 with \(m_{1}=m, m_{2}=2 m, m_{3}=m, k_{1}=k_{2}=k\), and \(k_{3}=2 k\).Data From Problem 6.27:-Derive the flexibility and stiffness matrices of the spring-mass system shown in Fig. 6.32 assuming that all the
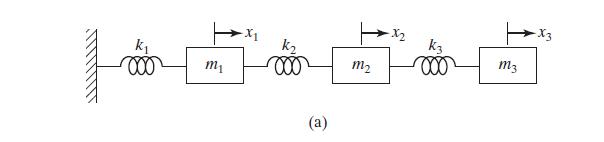
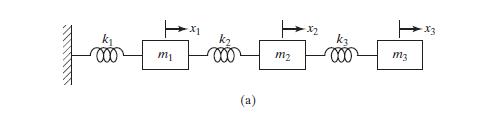
Show that the natural frequencies of the system shown in Fig. 6.6(a), with \(k_{1}=3 k\), \(k_{2}=k_{3}=k, m_{1}=4 m, m_{2}=2 m\), and \(m_{3}=m\), are given by \(\omega_{1}=0.46 \sqrt{k / m}\), \(\omega_{2}=\sqrt{k / m}\), and \(\omega_{3}=1.34 \sqrt{k / m}\). Find the eigenvectors of the
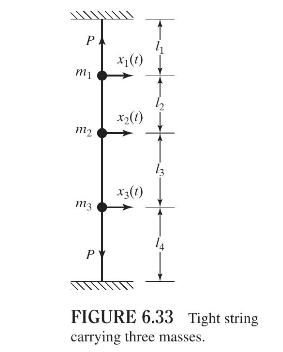
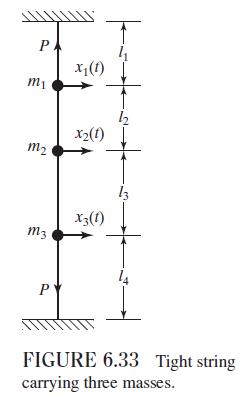
Find the natural frequencies of the system considered in Problem 6.28 with \(m_{1}=2 m, m_{2}=m, m_{3}=3 m\), and \(l_{1}=l_{2}=l_{3}=l_{4}=l\).Data From Problem 6.28:-Derive the equations of motion for the tightly stretched string carrying three masses, as shown in Fig. 6.33. Assume the ends of
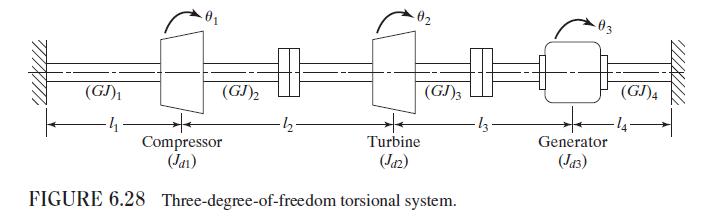
Find the natural frequencies and principal modes of the torsional system shown in Fig. 6.28 for \((G J)_{i}=G J, i=1,2,3,4, J_{d 1}=J_{d 2}=J_{d 3}=J_{0}\), and \(l_{1}=l_{2}=l_{3}=l_{4}=l\).Figure 6.28:- 01 02 03 (GJ)1 (GJ)2 h Compressor Turbine (Jan) (Jaz) (GJ)3 FIGURE 6.28
The mass matrix \([m]\) and the stiffness matrix \([k]\) of a uniform bar arewhere \(ho\) is the density, \(A\) is the cross-sectional area, \(E\) is Young's modulus, and \(l\) is the length of the bar. Find the natural frequencies of the system by finding the roots of the characteristic equation.
The mass matrix of a vibrating system is given by\[[m]=\left[\begin{array}{lll}1 & 0 & 0 \\0 & 2 & 0 \\0 & 0 & 1\end{array}\right]\]and the eigenvectors by Find the \([m]\)-orthonormal modal matrix of the system. {} - {} {}
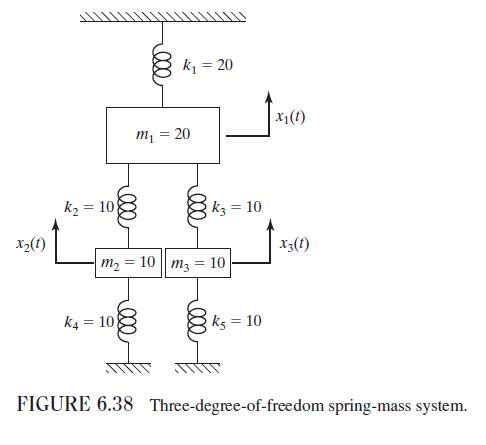
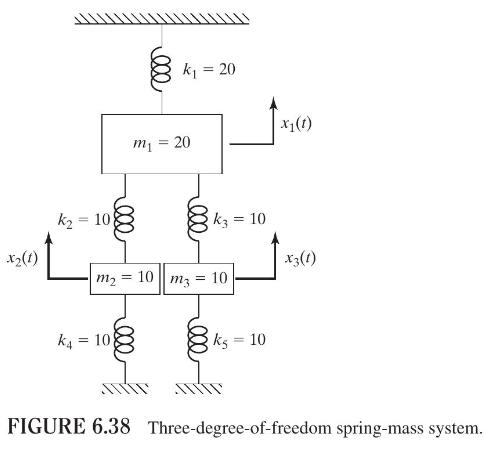
For the system shown in Fig. 6.38, (a) determine the characteristic polynomial \(\Delta\left(\omega^{2}\right)=\operatorname{det}\left|[k]-\omega^{2}[m]\right|\), (b) plot \(\Delta\left(\omega^{2}\right)\) from \(\omega^{2}=0\) to \(\omega^{2}=4.0\) (using increments \(\Delta \omega^{2}=0.2\) ),
(a) Two of the eigenvectors of a vibrating system are known to beProve that these are orthogonal with respect to the mass matrix\[[m]=\left[\begin{array}{lll}1 & 0 & 0 \\0 & 2 & 0 \\0 & 0 & 3\end{array}\right]\]Find the remaining \([\mathrm{m}]\)-orthogonal eigenvector.(b)
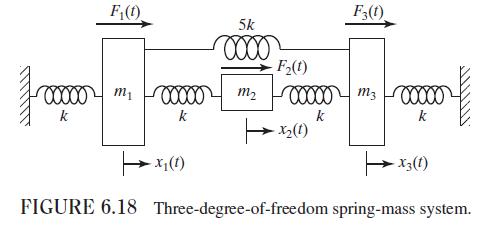
Find the natural frequencies of the system shown in Fig. 6.18 for \(m_{i}=m, i=1,2,3\). F(1) 5k F3(1) F2(t) m 00000 my m3 k x(1) k k (1)x -X3(1) FIGURE 6.18 Three-degree-of-freedom spring-mass system.
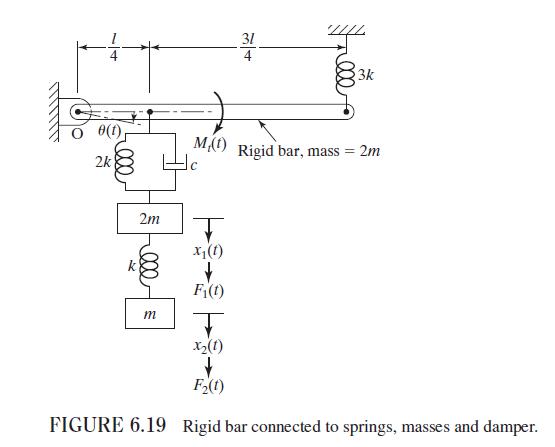
Find the natural frequencies of the system shown in Fig. 6.19 with \(m=1 \mathrm{~kg}, l=1 \mathrm{~m}\), \(k=1000 \mathrm{~N} / \mathrm{m}\), and \(c=100 \mathrm{~N}-\mathrm{s} / \mathrm{m}\).Figure 6.19:- 8(1) 2k 000 31 3k M.(f) Rigid bar, mass = 2m 2m x(1) F(t) m x(1) F2(t) FIGURE 6.19 Rigid
Consider the eigenvalue problem\[\left[[k]-\omega^{2}[m]\right] \vec{X}=\overrightarrow{0}\]whereFind the natural frequencies by finding the roots of the characteristic equation\[\left|[m]^{-1}[k]-\omega^{2}[I]\right|=0\]Compare your results with the ones obtained in Example 6.11.Data From Example
Find the eigenvalues and eigenvectors of the following matrix:\[[A]=\left[\begin{array}{cc}8 & -1 \\-4 & 4\end{array}\right]\]\[[[A]-\lambda[I]] \vec{X}=\overrightarrow{0}\]where \(\lambda\) is the eigenvalue and \(\vec{X}\) is the eigenvector.
Consider the eigenvalue problem:a. Find the natural frequencies and mode shapes of the system.b. Change the coordinates in Eq. (E.1) as \(X_{1}=Y_{1}\) and \(X_{2}=3 Y_{2}\) and express the eigenvalue problem in terms of the eigenvector \(\vec{Y}=\left\{\begin{array}{l}Y_{1} \\
Consider the eigenvalue problem\[\left[[k]-\omega^{2}[m]\right] \vec{X}=\overrightarrow{0}\]where\[[m]=\left[\begin{array}{cc}2 & 0 \\0 & 1\end{array}\right] \text { and }[k]=\left[\begin{array}{cc}8 & -4 \\-4 & 4\end{array}\right]\]Find the natural frequencies and mode shapes of the system:a. by
Consider the eigenvalue problem:where Equation (E.1) can be expressed as\[[D] \vec{X}=\lambda \vec{X}\]where\[[D]=\left([m]^{\frac{1}{2}}\right)^{-1}[k]\left([m]^{\frac{1}{2}}\right)^{-1}\]is called the mass normalized stiffness matrix. Determine the mass normalized stiffness matrix and use it to
A symmetric positive definite matrix, such as the mass matrix of a multidegree-of-freedom system, \([m]\), can be expressed as the product of a lower triangular matrix, \([L]\), and an upper triangular matrix, \([L]^{T}\), asusing a procedure known as the Choleski method [6.18]. For a mass matrix
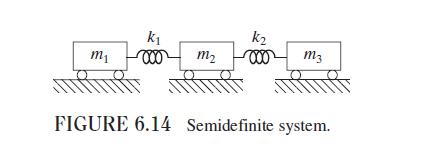
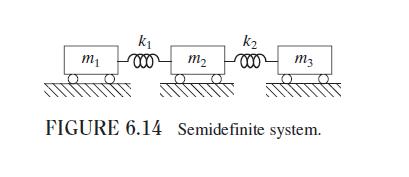
Find the natural frequencies and mode shapes of the system shown in Fig. 6.14 with \(m_{1}=m, m_{2}=2 m, m_{3}=3 m\), and \(k_{1}=k_{2}=k\). k k m m2 000 m3 FIGURE 6.14 Semidefinite system.
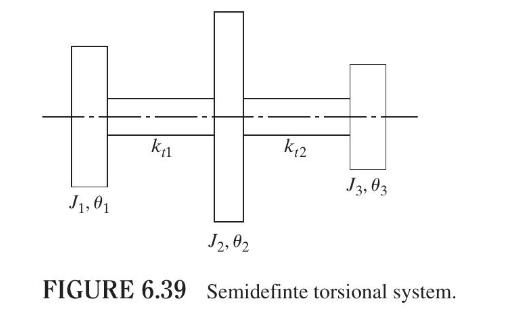
Find the modal matrix for the semidefinite system shown in Fig. 6.39 for \(J_{1}=J_{2}=\) \(J_{3}=J_{0}, k_{t 1}=k_{t}\), and \(k_{t 2}=2 k_{t}\). k1 k2 J3,03 J1,01 J2,02 FIGURE 6.39 Semidefinte torsional system.
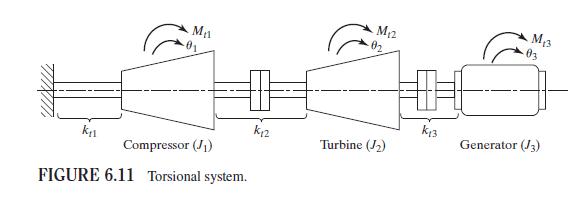
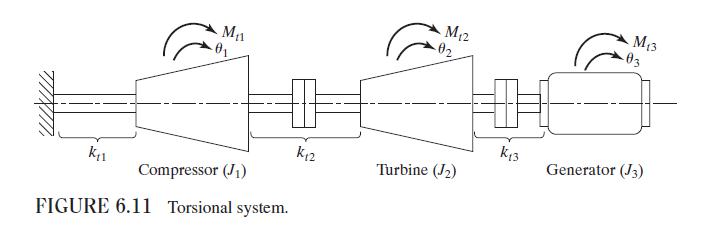
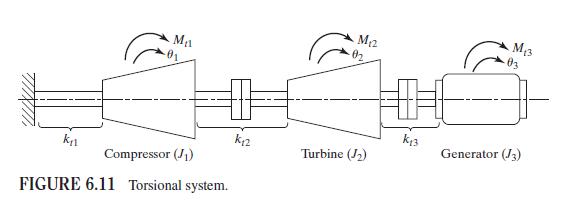
Using Rayleigh's method, find the fundamental natural frequency of the torsional system shown in Fig. 6.11. Assume that \(J_{1}=J_{0}, J_{2}=2 J_{0}, J_{3}=3 J_{0}\), and \(k_{t 1}=k_{t 2}=k_{t 3}=k_{t}\). M2 M3 03 02 Mn k13 k12 K1 Turbine (2) Generator (J3) Compressor (1) FIGURE 6.11 Torsional
Fill in the Blank.For a shaft carrying masses \(m_{1}, m_{2}, \ldots\), Rayleigh's method gives the natural frequency as\[\omega=\left\{\frac{g\left(m_{1} w_{1}+m_{2} w_{2}+\cdots\right)}{m_{1} w_{1}^{2}+m_{2} w_{2}^{2}+\cdots}\right\}^{1 / 2}\]where \(w_{1}, w_{2}, \ldots\) denote the ___________
True or False.In the matrix iteration method, any computational error will not yield incorrect results.
Can we use any trial vector \(\vec{X}_{1}\) in the matrix iteration method to find the largest natural frequency?
Rayleigh's methoda. Finds the natural frequencies and mode shapes of the system, one at a time, using several trial values for each frequency.b. Finds all the natural frequencies using trial vectors and matrix deflation procedure.c. Finds all the eigenvalues and eigenvectors simultaneously without
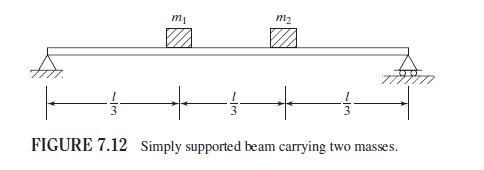
A uniform simply supported beam carries two masses \(m_{1}\) and \(m_{2}\) with \(m_{2}=3 m_{1}\) as shown in Fig. 7.12. Find the fundamental natural frequency of the beam using Dunkerley's method. mi m2 FIGURE 7.12 Simply supported beam carrying two masses.
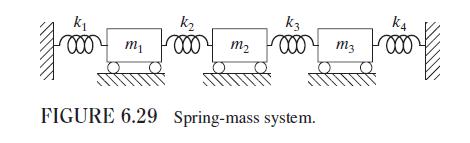
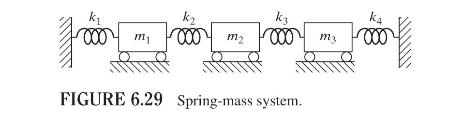
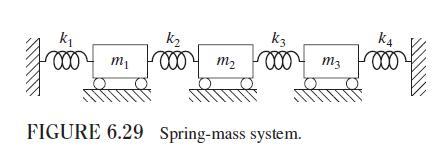
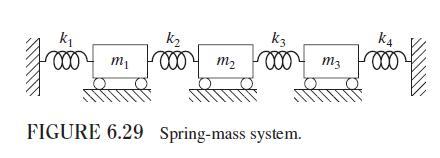
Find the free-vibration response of the spring-mass system shown in Fig. 6.29 for \(k_{i}=k(i=1,2,3,4), m_{1}=2 m, m_{2}=3 m, m_{3}=2 m\) for the initial conditions \(x_{1}(0)=x_{10}\) and \(x_{2}(0)=x_{3}(0)=\dot{x}_{1}(0)=\dot{x}_{2}(0)=\dot{x}_{3}(0)=0\). k 000 k K3 k4 m 000 m 000 m3 000 FIGURE
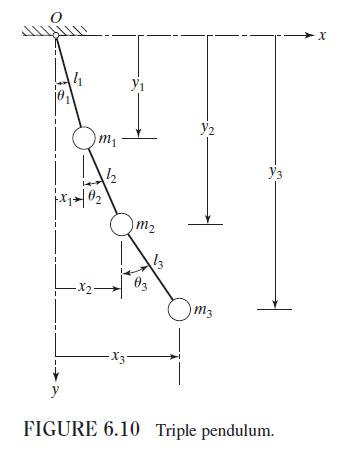
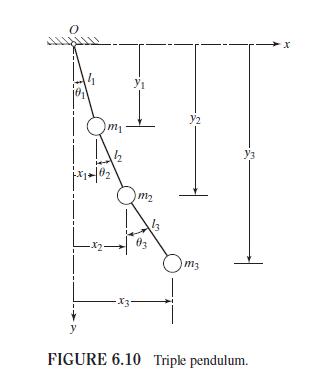
Find the free-vibration response of the triple pendulum shown in Fig. 6.10 for \(l_{i}=l(i=1,2,3)\) and \(m_{i}=m(i=1,2,3)\) for the initial conditions \(\theta_{1}(0)=\theta_{2}(0)=0\), \(\theta_{3}(0)=\theta_{30}, \dot{\theta}_{i}(0)=0(i=1,2,3)\).Figure 6.10:- 41 m 2 y Y2 -x3- y m2 03 13 m3
Find the free-vibration response of the spring-mass system shown in Fig. 6.32 for \(m_{1}=m, m_{2}=2 m, m_{3}=m, k_{1}=k_{2}=k\), and \(k_{3}=2 k\) corresponding to the initial conditions \(\dot{x}_{3}(0)=\dot{x}_{30}\), and \(x_{1}(0)=x_{2}(0)=x_{3}(0)=\dot{x}_{1}(0)=\dot{x}_{2}(0)=0\).Figure
In the freight car system shown in Fig. 6.14, the first car acquires a velocity of \(\dot{x}_{0}\) due to an impact. Find the resulting free vibration of the system. Assume \(m_{i}=m(i=1,2,3)\) and \(k_{1}=k_{2}=k\).Figure 6.14:- k k2 m 000 m2 000 m3 FIGURE 6.14 Semidefinite system.
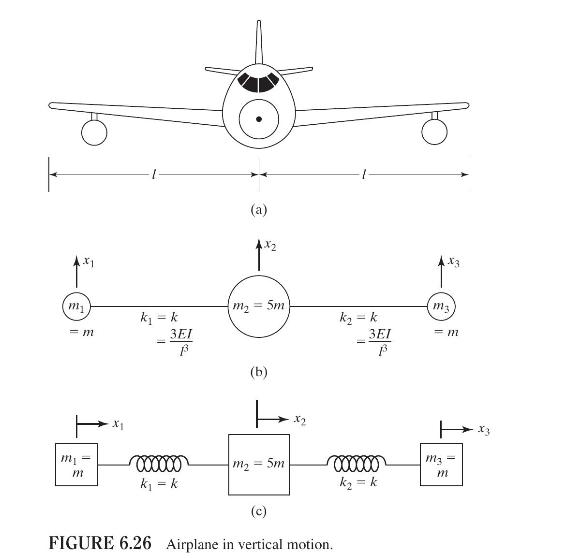
Find the free-vibration response of the three-degree-of-freedom airplane model considered in Problem 6.10 for the following data: \(m=5000 \mathrm{~kg}, l=5 \mathrm{~m}, E=7 \mathrm{GPa}, I=8 \times 10^{-6} \mathrm{~m}^{4}\). Assume that the initial conditions correspond to that of a gust which
Find the free-vibration response of the spring-mass system shown in Fig. 6.6 (a) for \(k_{1}=k, k_{2}=2 k, k_{3}=3 k, m_{1}=m, m_{2}=2 m\), and \(m_{3}=3 m\) corresponding to the initial conditions \(\dot{x}_{1}(0)=\dot{x}_{10}, x_{i}(0)=0(i=1,2,3)\), and \(\dot{x}_{2}(0)=\dot{x}_{3}(0)=0\).Figure
Find the free-vibration response of the tightly stretched string shown in Fig. 6.33 for \(m_{1}=2 m, m_{2}=m, m_{3}=3 m\), and \(l_{i}=l(i=1,2,3,4)\). Assume the initial conditions as \(x_{1}(0)=x_{3}(0)=0, x_{2}(0)=x_{20}, \dot{x}_{i}(0)=0(i=1,2,3)\).Figure 6.33:- P m1 x(1) m2 X2(1) 12 13 X3(1) m3
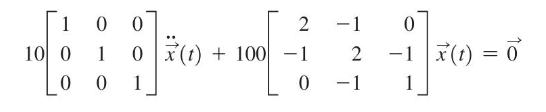
Find the free-vibration response of a three-degree-of-freedom system governed by the equationAssume the initial conditions as \(x_{i}(0)=0.1\) and \(\dot{x}_{i}(0)=0 ; i=1,2,3\). 2 -1 0 2 -1 x(t) = 0 0 -1 1 0 (t) +100-1 1 0 0 10 0 1 0 0 1
The free-vibration solution of a two-degree-of-freedom system can be determined by solving the equationswith \(\vec{x}=\left\{\begin{array}{l}x_{1}(t) \\ x_{2}(t)\end{array}\right\}\), using the initial conditionsIf \(\omega_{1}\) and \(\omega_{2}\) are the natural frequencies and \(\vec{u}_{1}\)
(a) Determine the natural frequencies and mode shapes of the torsional system shown in Fig. 6.11 for \(k_{t 1}=k_{t 2}=k_{t 3}=k_{t}\) and \(J_{1}=J_{2}=J_{3}=J_{0}\).(b) If a torque \(M_{t 3}(t)=\) \(M_{t 0} \cos \omega t\), with \(M_{t 0}=500 \mathrm{~N}-\mathrm{m}\) and \(\omega=100 \mathrm{rad}
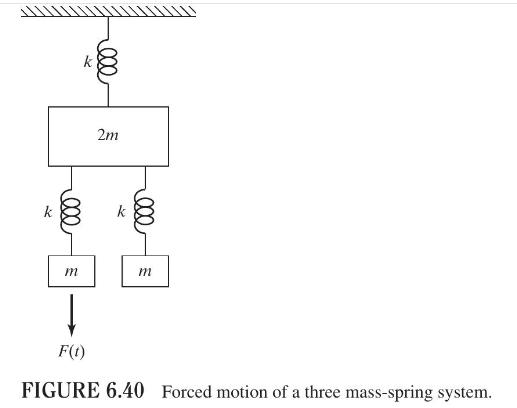
Determine the amplitudes of motion of the three masses in Fig. 6.40 when a harmonic force \(F(t)=F_{0} \sin \omega t\) is applied to the lower left mass with \(m=1 \mathrm{~kg}, k=1000 \mathrm{~N} / \mathrm{m}, F_{0}=5 \mathrm{~N}\), and \(\omega=10 \mathrm{rad} / \mathrm{s}\) using the mode
Using the results of Problems 6.24 and 6.56, determine the modal matrix \([X]\) of the system shown in Fig. 6.29 and derive the uncoupled equations of motion.Data From Problem 6.24:-Find the flexibility and stiffness influence coefficients of the system shown in Fig. 6.29. Also, derive the
Using modal analysis, determine the free-vibration response of a two-degree-of-freedom system with equations of motion\[2\left[\begin{array}{ll}1 & 0 \\0 & 1\end{array}\right] \ddot{\vec{x}}(t)+8\left[\begin{array}{rr}2 & -1 \\-1 & 2\end{array}\right] \vec{x}(t)=\overrightarrow{0}\]with initial
Consider the free-vibration equations of an undamped two-degree-of-freedom system:\[[m] \ddot{\vec{x}}+[k] \vec{x}=\overrightarrow{0}\]with\[[m]=\left[\begin{array}{ll}1 & 0 \\0 & 4\end{array}\right] \text { and }[k]=\left[\begin{array}{rr}8 & -2 \\-2 & 2\end{array}\right]\]a. Find the orthonormal
For the two-degree-of-freedom system considered in Problem 6.85, find the free-vibration response, \(x_{1}(t)\) and \(x_{2}(t)\), using the modal equations derived in Problem 6.85 for the following initial conditions: \(x_{1}(0)=2, x_{2}(0)=3, \dot{x}_{1}(0)=\dot{x}_{2}(0)=0\).Data From Problem
Determine the response of the system in Problem 6.51 to the initial conditions \(x_{1}(0)=1\), \(\dot{x}_{1}(0)=0, x_{2}(0)=2, \dot{x}_{2}(0)=1, x_{3}(0)=1\), and \(\dot{x}_{3}(0)=-1\). Assume \(k / m=1\).Data From Problem 6.51:-Find the natural frequencies and mode shapes of the system shown in
An approximate solution of a multi-degree-of-freedom system can be obtained using the mode acceleration method. According to this method, the equations of motion of an undamped system, for example, are expressed asand \(\ddot{\vec{x}}\) is approximated using the first \(r\) modes \((rSince
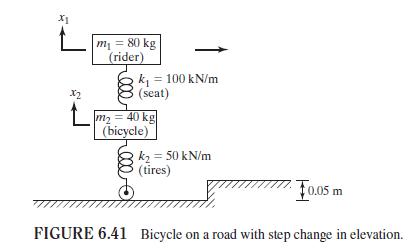
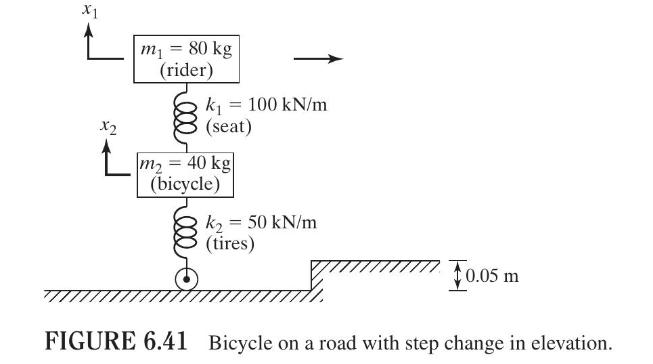
A simplified model of a bicycle with its rider is shown in Fig. 6.41. Find the vertical motion of the rider when the bicycle hits an elevated road, as shown in the figure.Figure 6.41:- x2 L m = 80 kg (rider) k = 100 kN/m (seat) m2 40 kg = =40 (bicycle) k = 50 kN/m (tires) 10.05 m FIGURE 6.41
Find the response of the triple pendulum shown in Fig. 6.10 for \(l_{i}=0.5 \mathrm{~m}(i=1,2,3)\) and \(m_{i}=1 \mathrm{~kg}(i=1,2,3)\) when a moment, in the form of a rectangular pulse of magnitude \(0.1 \mathrm{~N}-\mathrm{m}\) and duration \(0.1 \mathrm{~s}\), is applied along the direction of
Consider a two-degree-of-freedom system with the equations of motion \([m] \ddot{\vec{x}}+[k] \vec{x}=\vec{f}(t)\) witha. Derive the modal equations for the forced-vibration response of the system.b. Determine the conditions to be satisfied by \(f_{1}(t)\) and \(f_{2}(t)\) in order to influence
Find the response of the spring-mass system shown in Fig. 6.6 (a) for \(k_{1}=k, k_{2}=2 k\), \(k_{3}=3 k, m_{1}=m, m_{2}=2 m\), and \(m_{3}=3 m\) with \(k=10^{4} \mathrm{~N} / \mathrm{m}\) and \(m=2 \mathrm{~kg}\) when a force, in the form of a rectangular pulse of magnitude \(1000 \mathrm{~N}\)
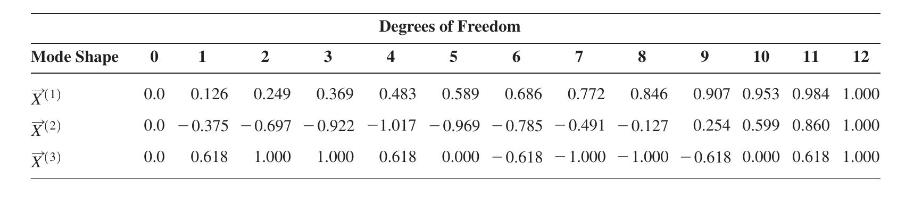
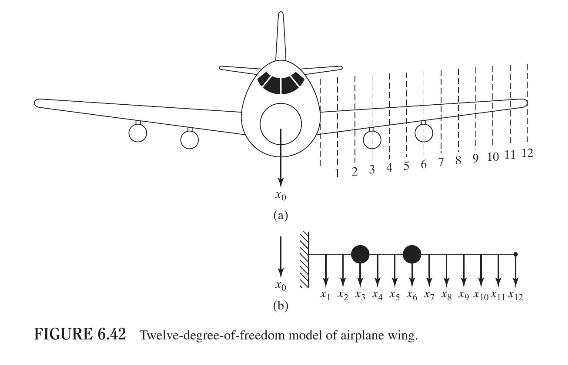
An airplane wing, Fig. 6.42(a), is modeled as a twelve-degree-of-freedom lumped-mass system as shown in Fig. 6.42(b). The first three natural mode shapes, obtained experimentally, are given below.The natural frequencies corresponding to the three mode shapes are given by \(\omega_{1}=225
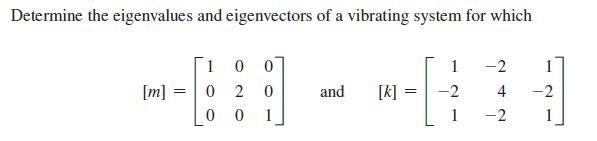
Using MATLAB, find the eigenvalues and eigenvectors of a system with mass and stiffness matrices given in Example 6.13.Data From Example 6.13:- Determine the eigenvalues and eigenvectors of a vibrating system for which 1 00 1 -2 [m] = 0 2 0 and [k] = -2 4 -2 0 0 1 1 -2
Show that the initial conditions of the generalized coordinates \(q_{i}(t)\) can be expressed in terms of those of the physical coordinates \(x_{i}(t)\) in modal analysis as\[\vec{q}(0)=[X]^{T}[m] \vec{x}(0), \quad \dot{\vec{q}}(0)=[X]^{T}[m] \dot{\vec{x}}(0)\]
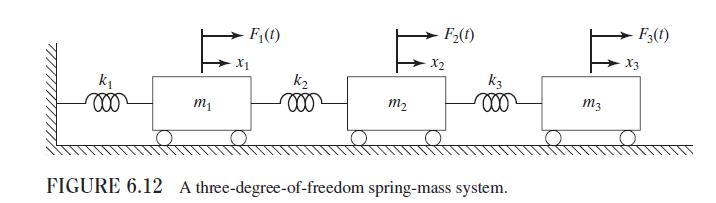
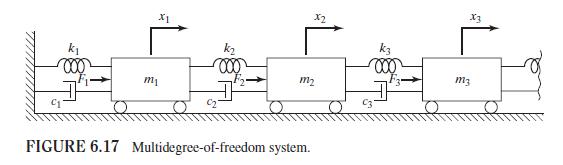
Find the steady-state response of the system shown in Fig. 6.17 with \(k_{1}=k_{2}=k_{3}=k_{4}\) \(=100 \mathrm{~N} / \mathrm{m}, c_{1}=c_{2}=c_{3}=c_{4}=1 \mathrm{~N}-\mathrm{s} / \mathrm{m}, m_{1}=m_{2}=m_{3}=1 \mathrm{~kg}, F_{1}(t)=F_{0} \cos \omega t\), \(F_{0}=10 \mathrm{~N}\), and \(\omega=1
Using MATLAB, find and plot the free-vibration response of the system described in Problem 6.79 for the following data: \(x_{20}=0.5, P=100, l=5, m=2\).Data From Problem 6.79:-Find the free-vibration response of the tightly stretched string shown in Fig. 6.33 for \(m_{1}=2 m, m_{2}=m, m_{3}=3 m\),
Using the MATLAB function ode23, find and plot the forced-vibration response of the system described in Problem 6.89.Data From Problem 6.89:-Determine the amplitudes of motion of the three masses in Fig. 6.40 when a harmonic force \(F(t)=F_{0} \sin \omega t\) is applied to the lower left mass with
Find the forced-vibration response of a viscously damped three-degree-of-freedom system with equations of motion:Assume zero initial conditions. (1) 0(t) +5 0 10 0 2 0 0 3 5 cos 2t 3 T - 7 -3 0 4 -3 x(t) + 20-3 5 -2 (1) = 0 0 -3 3 0 -2 2
Using the MATLAB function ode23, solve Problem 6.99 and plot \(x_{1}(t), x_{2}(t)\), and \(x_{3}(t)\).Data From Problem 6.99:-Find the steady-state response of the system shown in Fig. 6.17 with \(k_{1}=k_{2}=k_{3}=k_{4}\) \(=100 \mathrm{~N} / \mathrm{m}, c_{1}=c_{2}=c_{3}=c_{4}=1
Using the MATLAB function roots, find the roots of the following equation:\[f(x)=x^{12}-2=0\]
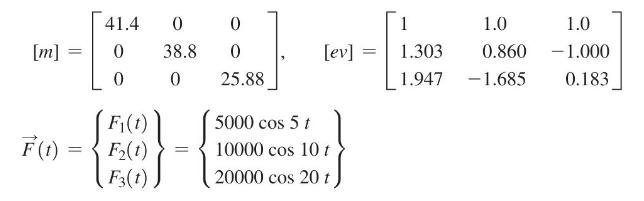
Using Program8 . m, find the steady-state response of a three-degree-of-freedom system with the following data: W == 25.076 rad/s, Si = 0.001, i = = w2 53.578 rad/s, 1,2,3 = w3 110.907 rad/s
Using Program 7 .m, generate the characteristic polynomial corresponding to the matrix\[ [A]=\left[\begin{array}{lll}5 & 3 & 2 \\3 & 6 & 4 \\1 & 2 & 6\end{array}\right]\]
Find and plot the response, \(x_{1}(t)\) and \(x_{2}(t)\), of a system with the following equations of motion:using the initial conditions:Solve the differential equations, numerically using a suitable MATLAB function. 5 0 2] {*} + [ 0.5 -0.6 -0.6 0.8 *10)+2210-8 = {} sin 2t (E.1)
Write a computer program for finding the eigenvectors using the known eigenvalues in \(\mathrm{Eq}\). (6.61). Find the mode shapes of Problem 6.57 using this program.Data From Problem 6.57:-Find the natural frequencies and mode shapes of the system shown in Fig. 6.29 for
Write a computer program for generating the \([m]\)-orthonormal modal matrix \([X]\). The program should accept the number of degrees of freedom, the normal modes, and the mass matrix as input. Solve Problem 6.64 using this program.Data From Problem 6.64:-The mass matrix of a vibrating system is
The equations of motion of an undamped system in SI units are given byUsing subroutine MODAL, find the steady-state response of the system when \(\omega=5 \mathrm{rad} / \mathrm{s}\). 10 sin wot 2 0 0 16 -8 0 0 2 0 + -8 16 -8 = 0 0 0 2 0 -8 16 0
Find the response of the system in Problem 6.112 by varying \(\omega\) between \(1 \mathrm{rad} / \mathrm{s}\) and \(10 \mathrm{rad} / \mathrm{s}\) in increments of \(1 \mathrm{rad} / \mathrm{s}\). Plot the graphs showing the variations of magnitudes of the first peaks of \(x_{i}(t), i=1,2,3\),
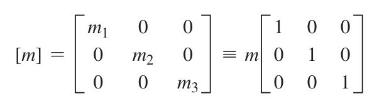
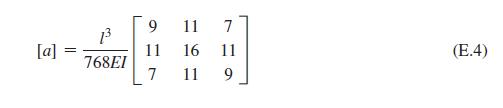
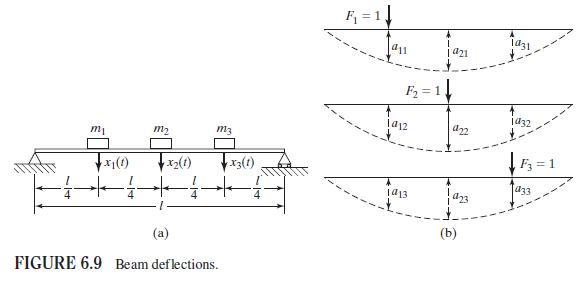
Find the natural frequencies of vibration and the corresponding mode shapes of the beam shown in Fig. 6.9 using the mass matrixand the flexibility matrix given by Eq. (E.4) of Example 6.6.Equation E.4:-Data From Example 6.6:-Figure 6.9(a):- [m] = m 0 0 0 0 m2 0 1 0 0 0 m3 = m0 1 00 1
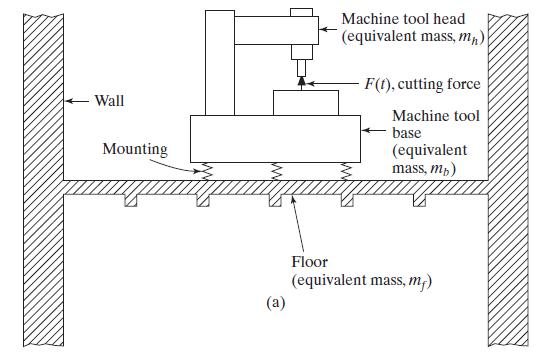
A heavy machine tool mounted on the first floor of a building, Fig. 6.43(a), has been modeled as a three-degree-of-freedom system as indicated in Fig. 6.43(b).(a) For \(k_{1}=875 \mathrm{kN} / \mathrm{m}\), \(k_{2}=87 \mathrm{kN} / \mathrm{m}, k_{3}=350 \mathrm{kN} / \mathrm{m},
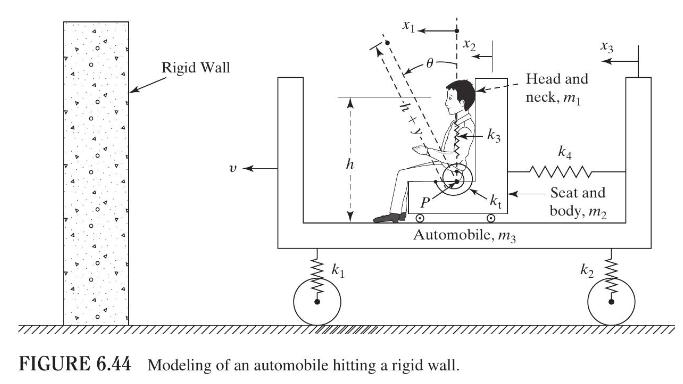
Figure 6.44 shows a model of an automobile including the masses of the automobile, seat and body, and head and neck of the passenger. The suspension system of the automobile is modeled by two linear springs \(k_{1}\) and \(k_{2}\) with the wheels assumed to have negligible mass. The head and neck
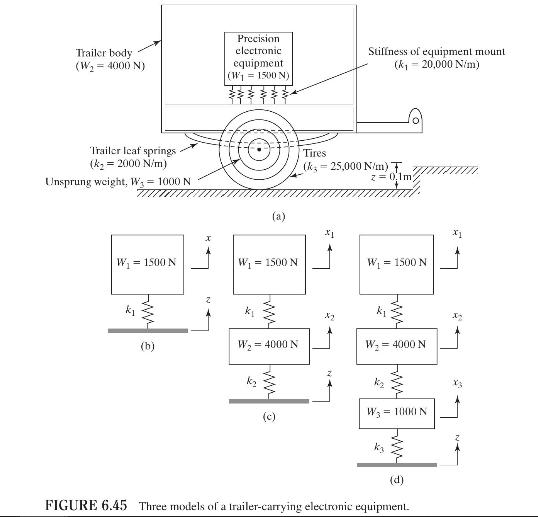
It is proposed to transport a precision electronic equipment of weight \(\mathrm{W}_{1}=5000 \mathrm{~N}\) by a trailer. The electronic equipment is placed in the trailer on a rubber mount of stiffness \(k_{1}=10,000 \mathrm{~N} / \mathrm{m}\). The trailer's leaf springs have a total stiffness of
When the trial vector\[\vec{X}^{(1)}=\left\{\begin{array}{l}1 \\1 \\1\end{array}\right\}\]is used for the solution of the eigenvalue problem,\[\left[\begin{array}{lll}1 & 1 & 2 \\1 & 2 & 2 \\1 & 2 & 3\end{array}\right] \vec{X}=\lambda \vec{X}\]the next trial vector, \(\vec{X}^{(2)}\), given by the
Estimate the fundamental frequency of the beam shown in Fig. 6.9 using Dunkerley's formula for the following data:(a) \(m_{1}=m_{3}=5 m, m_{2}=m\) and(b) \(m_{1}=m_{3}=m, m_{2}=5 m\).Figure 6.9:- 1031 11 ja21 F2 1, 1a12 m m m3 x1(0) 7x2(1) x3(1) 1013 (a) FIGURE 6.9 Beam deflections. (b) 1032 22
Name a few methods for finding the fundamental natural frequency of a multidegree-offreedom system.
True or False.The fundamental frequency given by Durkerley's formula will always be larger than the exact value.
Fill in the Blank.Any symmetric positive definite matrix \([A]\) can be decomposed as \([A]=[U]^{T}[U]\), where \([U]\) is ___________ triangular matrix.
For a semidefinite system, the final equation in Holzer's method denotes thea. amplitude at the end as zerob. sum of inertia forces as zeroc. equation of motion
Find the fundamental frequency of the torsional system shown in Fig. 6.11, using Dunkerley's formula for the following data:(a) \(J_{1}=J_{2}=J_{3}=J_{0} ; k_{t 1}=k_{t 2}=k_{t 3}=k_{t}\); and(b) \(J_{1}=J_{0}, J_{2}=2 J_{0}, J_{3}=3 J_{0} ; k_{t 1}=k_{t}, k_{t 2}=2 k_{t}, k_{t 3}=3 k_{t}\).Figure
What is the basic assumption made in deriving Dunkerley's formula?
True or False.The fundamental frequency given by Rayleigh's method will always be larger than the exact value.
Fill in the Blank.The method of decomposing a symmetric positive definite matrix \([A]\) as \([A]=[U]^{T}[U]\) is known as ___________ method.
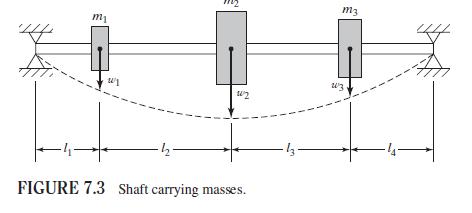
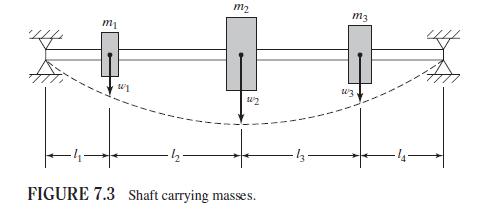
Estimate the fundamental frequency of the shaft shown in Fig. 7.3, using Dunkerley's formula for the following data: \(m_{1}=m, m_{2}=2 m, m_{3}=3 m, l_{1}=l_{2}=l_{3}=l_{4}=l / 4\).Figure 7.3:- m m3 W2 W3 -4- FIGURE 7.3 Shaft carrying masses. 13-
Dunkerley's formula is given bya. \(\omega_{1}^{2} \approx a_{11} m_{1}+a_{22} m_{2}+\cdots+a_{n n} m_{n}\)b. \(\frac{1}{\omega_{1}^{2}} \approx a_{11} m_{1}+a_{22} m_{2}+\cdots+a_{n n} m_{n}\)c. \(\frac{1}{\omega_{1}^{2}} \approx k_{11} m_{1}+k_{22} m_{2}+\cdots+k_{n n} m_{n}\)
What is Rayleigh's principle?
True or False.\([A] \vec{X}=\lambda[B] \vec{X}\) is a standard eigenvalue problem.
Fill in the Blank.Each step of Jacobi's method reduces a pair of off-diagonal elements to ___________ .
Rayleigh's quotient is given bya. \(\frac{\vec{X}^{T}[k] \vec{X}}{\vec{X}^{T}[m] \vec{X}}\)b. \(\frac{\vec{X}^{T}[m] \vec{X}}{\vec{X}^{T}[k] \vec{X}}\)c. \(\frac{\vec{X}^{T}[k] \vec{X}}{\dot{\vec{X}}^{T}[m] \dot{\vec{X}}}\)
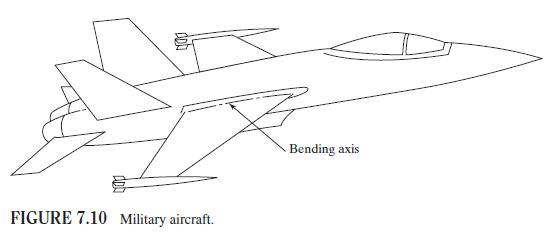
The natural frequency of vibration, in bending, of the wing of a military aircraft is found to be \(20 \mathrm{~Hz}\). Find the new frequency of bending vibration of the wing when a weapon of mass \(850 \mathrm{~kg}\) is attached at the tip of the wing, as shown in Fig. 7.10. The stiffness of the
State whether we get a lower bound or an upper bound to the fundamental natural frequency if we use(a) Dunkerley's formula and(b) Rayleigh's method.
True or False.\([A] \vec{X}=\lambda[I][B] \vec{X}\) is a standard eigenvalue problem.
Fill in the Blank.The ___________ theorem permits the representation of any vector as a linear combination of the eigenvectors of the system.
Rayleigh's quotient satisfies the following relation:a. \(R(\vec{X}) \leq \omega_{1}^{2}\)b. \(R(\vec{X}) \geq \omega_{n}^{2}\)c. \(R(\vec{X}) \geq \omega_{1}^{2}\)
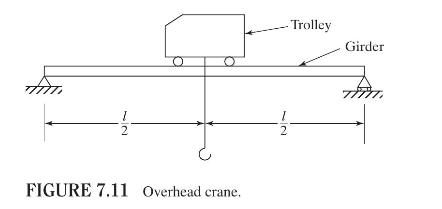
In an overhead crane (see Fig. 7.11) the trolley weighs ten times the weight of the girder. Using Dunkerley's formula, estimate the fundamental frequency of the system. 12 -Trolley Girder FIGURE 7.11 Overhead crane.
What is Rayleigh's quotient?
True or False.Jacobi's method can find the eigenvalues of only symmetric matrices.
Fill in the Blank.If the matrix iteration method converges to the smallest eigenvalue with \([D] \vec{X}=\lambda \vec{X}\), the method converges to the ___________ eigenvalue with \([D]^{-1} \vec{X}=\mu \vec{X}\).
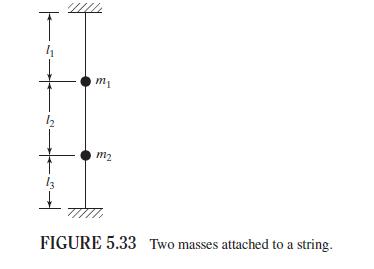
Using Dunkerley's formula, determine the fundamental natural frequency of the stretched string system shown in Fig. 5.33 with \(m_{1}=m_{2}=m\) and \(l_{1}=l_{2}=l_{3}=l\). T m m2 FIGURE 5.33 Two masses attached to a string.
Design a minimum-weight tubular section for the shaft shown in Fig. 7.3 to achieve a fundamental frequency of vibration of \(0.5 \mathrm{~Hz}\). Assume \(m_{1}=20 \mathrm{~kg}, m_{2}=50 \mathrm{~kg}, m_{3}=40 \mathrm{~kg}\), \(l_{1}=1 \mathrm{~m}, l_{2}=3 \mathrm{~m}, l_{3}=4 \mathrm{~m}, l_{4}=2
For a vibrating system with \([k]=\left[\begin{array}{rr}2 & -1 \\ -1 & 2\end{array}\right]\) and \([m]=\left[\begin{array}{ll}1 & 0 \\ 0 & 1\end{array}\right]\), the mode shape closest to the fundamental mode, according to the Rayleigh's quotient, \(R(\vec{X})=\frac{\vec{X}^{T}[k]
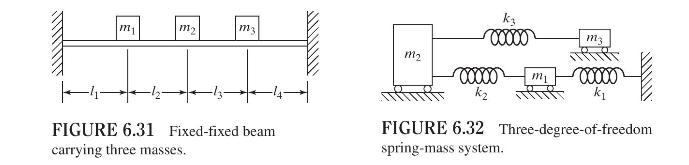
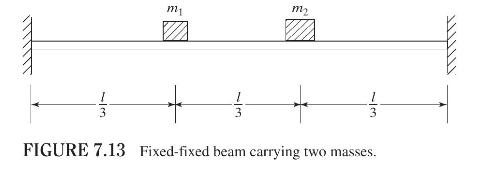
A uniform fixed-fixed beam carries two masses \(m_{1}\) and \(m_{2}\) with \(m_{2}=m_{1}\) as shown in Fig. 7.13. Find the fundamental natural frequency of the beam using Dunkerley's method. TITTI m m2 two masses. + FIGURE 7.13 Fixed-fixed beam carrying 1
What is the matrix iteration method?
Fill in the Blank.Rayleigh's quotient provides ___________ bound to \(\omega_{1}^{2}\) and bound to \(\omega_{n}^{2}\)
True or False.Jacobi's method uses rotation matrices.
Dunkerley's formulaa. Finds the natural frequencies and mode shapes of the system, one at a time, using several trial values for each frequency.b. Finds all the natural frequencies using trial vectors and matrix deflation procedure.c. Finds all the eigenvalues and eigenvectors simultaneously
What is the basic principle used in Holzer's method?
Holzer's methoda. Finds the natural frequencies and mode shapes of the system, one at a time, using several trial values for each frequency.b. Finds all the natural frequencies using trial vectors and matrix deflation procedure.c. Finds all the eigenvalues and eigenvectors simultaneously without
Showing 1300 - 1400
of 2655
First
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
Last
Step by Step Answers