New Semester
Started
Get
50% OFF
Study Help!
--h --m --s
Claim Now
Question Answers
Textbooks
Find textbooks, questions and answers
Oops, something went wrong!
Change your search query and then try again
S
Books
FREE
Study Help
Expert Questions
Accounting
General Management
Mathematics
Finance
Organizational Behaviour
Law
Physics
Operating System
Management Leadership
Sociology
Programming
Marketing
Database
Computer Network
Economics
Textbooks Solutions
Accounting
Managerial Accounting
Management Leadership
Cost Accounting
Statistics
Business Law
Corporate Finance
Finance
Economics
Auditing
Tutors
Online Tutors
Find a Tutor
Hire a Tutor
Become a Tutor
AI Tutor
AI Study Planner
NEW
Sell Books
Search
Search
Sign In
Register
study help
engineering
telecommunication engineering
Discrete Time Signal Processing 2nd Edition Alan V. Oppenheim, Rolan W. Schafer - Solutions
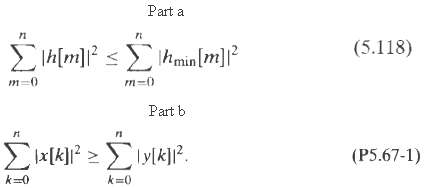
A causal all-pass system Hap(z) has input x[n] and output y[n]. (a) If x[n] is a real minimum-phase sequence (which also implies that x[n] = 0 for n (b) Show that Eq. (p5.67-1) holds even if x[n] is not minimum phase, but is zero for n
Determine whether the following statement is true or false. If it is true, concisely state your reasoning. If it is false, give a counterexample.Statement: If the system function H(z) has poles anywhere other than ar the origin of infinity, then the system cannot be a zero-phase or a generalized
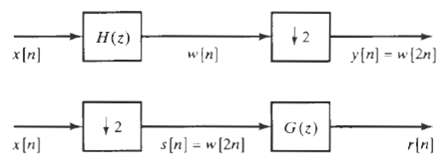
A signal x[n] is processed through an LTI system H(z) and then down sampled by a factor of 2 to yield y[n] as indicated in Figure. Also, as shown in the same figure, x[n] is first down sampled and then processed through an LTI system G(z) to obtain r[n]. (a) Specify a choice for H(z) (other than a
Consider a discrete-time LTI system with a real-valued impulse response h[n]. We want to find h [n], or equivalently, the system function H(z) from the autocorrelation chh[?] of the impulse response. The definition of the autocorrelation is? (a) If the system h[n] is causal and stable, can you
Let h[n] and H(z) denote the impulse response and system function of a stable all-pass LTI system. Let hi[n] denote the impulse response of the (stable) LTI inverse system. Assume that h[n] is real. Show that hi[n] = h[– n].
Consider a real-valued sequence x[n] for which X(ejω) = 0 for π/4 ≤ |ω| ≤ π. One sequence value of x[n] may have been corrupted, and we would like to recover it approximately or exactly. With g[n] denoting the corrupted signal, g[n] = x[n] for n ≠ n0,and
Show that if h[n] is an N-point FIR filter such that h[n] = h[N – 1 – n] and H(z0) = 0, then H(1/z0) = 0. This shows that even symmetric linear-phase FIR filters have zeros that are reciprocal images. (If h[n] is real, the zeros also will be real or will occur in complex conjugates.)
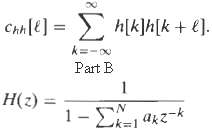
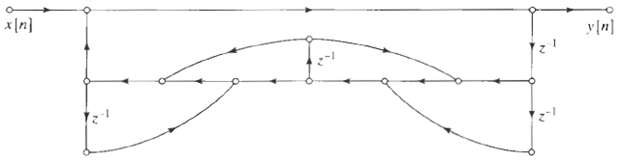
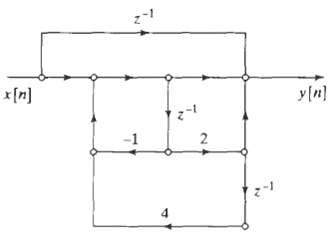
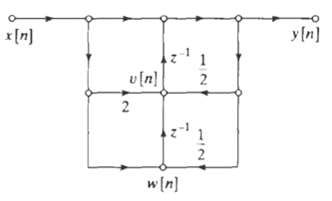
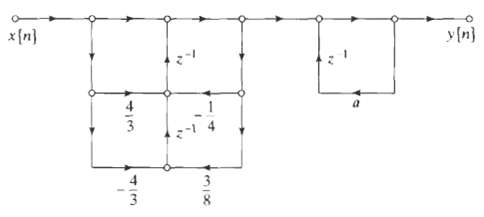
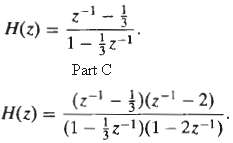
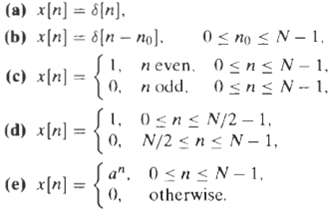
Determine the system function of the two networks in figure, and show that they have the samepoles.
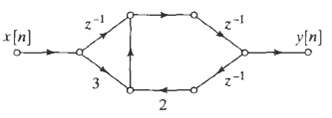
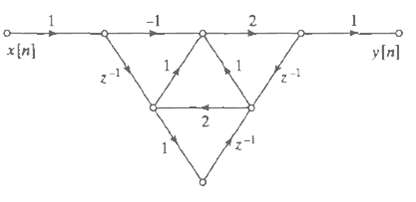
The signal flow graph of Figure represents a linear difference equation with constant coefficients. Determine the difference equation that relates the output y[n] to the input x[n].
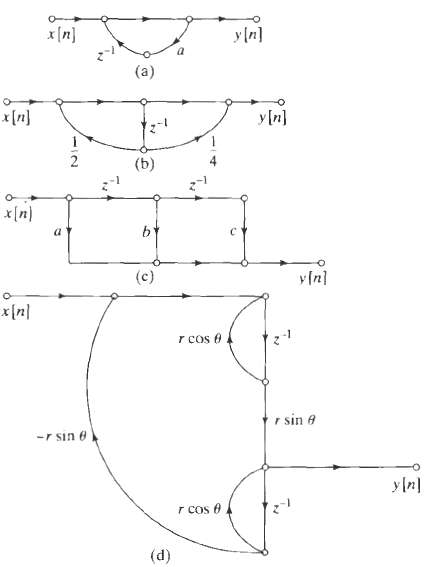
Consider the system in Figure (d).(a) Find the system function relating the z-transforms of the input and output.(b) Write the difference equation that is satisfied by the input sequence x[n] and the output sequence y[n].
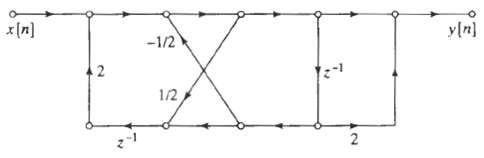
A linear time-invariant system is realized by the flow graph shown in Figure. (a) Write the difference equation relating x[n] and y[n] for this flow graph. (b) What is the system function of the system? (c) In the realization of Figure, how many real multiplications and real additions are required
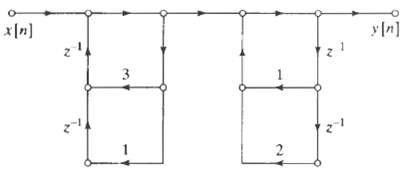
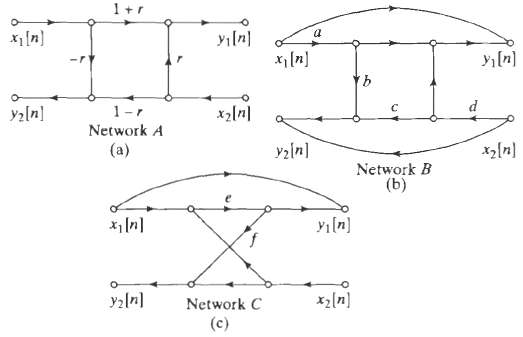
Determine the impulse response of each of the systems inFigure.
Let x[n] and y[n] be N-point sequences (N > 3) related by the following difference equation: y[n] – ¼ y[n – 2] = x[n – 2] – ¼ x[n]. Draw a direct form II signal flow graph for the causal LTI system corresponding to this difference equation.
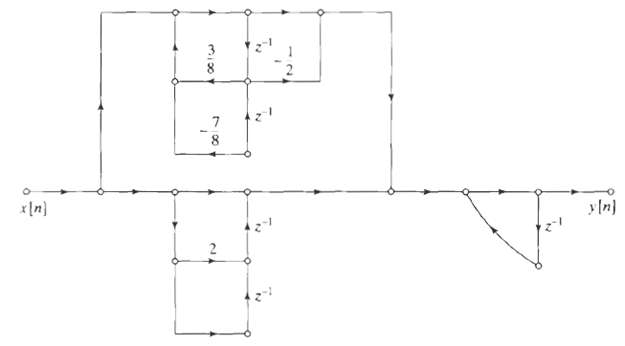
The signal flow graph in Figure represents an LTI system. Determine a difference equation that gives a relationship between the input x[n] and the output y[n] of this system. As usual, all branches of the signal flow graph have unity gain unless specifically indicated otherwise.
Figure shows the signal flow graph for a causal discrete-time LTI system. Branches without gains explicitly indicated have a gain of unity. (a) Determine h[1], the impulse response at n = 1. (b) Determine the difference equation relating x[n] and y [n].
Consider the signal flow graph shown in Figure. (a) Using the node variables indicated, write the set of difference equations represented by this network. (b) Draw the flow graph of an equivalent system that is the cascade of two first-order systems. (c) Is the system stable? Explain.
Consider a causal LTI system S with impulse response h[n] and system function (a) Draw a direct form II flow graph for the system S. (b) Draw the transposed form of the flow graph in Part(a).
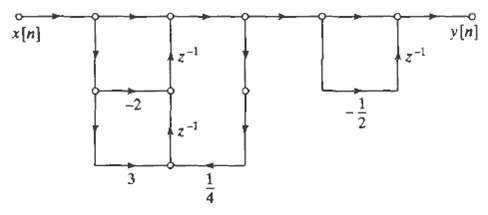
For the linear time-invariant system described by the flow graph in Figure, determine the difference equation relating the input x[n] to the output y[n]
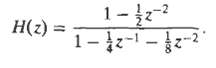
Draw the signal flow graph for the direct form I implementation of the LTI system with system function
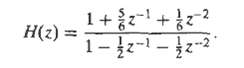
Draw the signal flow graph for the direct form II implementation of the LTI system with system function
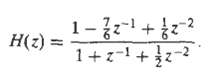
Draw the signal flow graph for the transposed direct form II implementation of the LTI system with system function
Consider the signal flow graph shown in figure. (a) Draw the signal flow graph that results from applying the transposition theorem to this signal flow graph. (b) Confirm that the transposed signal flow graph that you found in (a) has the same system function H(z) as the original system in the
Consider the causal LTI system with system function H(z) = 1 – 1/3 z–1 + 1/6 z–2 + z–3(a) Draw the signal flow graph for the direct form implementation of this system.(b) Draw the signal flow graph for the transposed direct form implementation of the system.
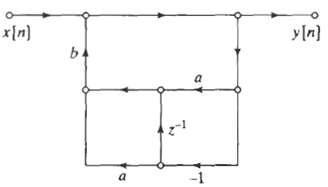
For some choices of the parameter ?, the signal flow graph in Figure can be replaced by a second-order direct form II signal flow graph implementing the same system function. Give one such choice for ? and the system function H(z) that results
Consider the causal LTI system with the system function Draw a signal flow graph that implements this system as a parallel combination of first-order transposed direct form IIsections.
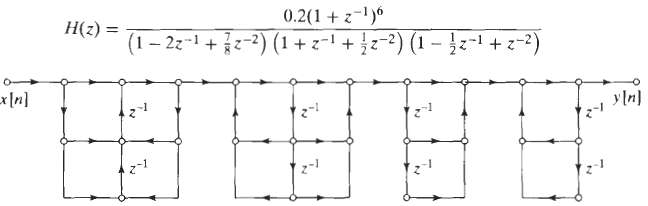
Draw a signal flow graph implementing the system function as a cascade of second-order transposed direct form II sections with realcoefficients. ? ?
For many applications, it is useful to have a system that will generate a sinusoidal sequence. One possible way to do this is with a system whose impulse response is h[n] = ejω0n u[n]. The real and imaginary parts of h[n] are therefore hr[n] = (cosω0n)u[n] and hi[n] = (sin ω0n)u[n],
For the system function draw the flow graphs of all possible realizations for this system as cascades of first-ordersystem.
Consider a causal linear time-invariant system whose system function is (a) Draw the signal flow graphs for implementations of the system in each of the following forms: (i) Direct form I (ii) Direct form II (iii) Cascade form using first-and second-order direct form II sections (iv) Parallel form
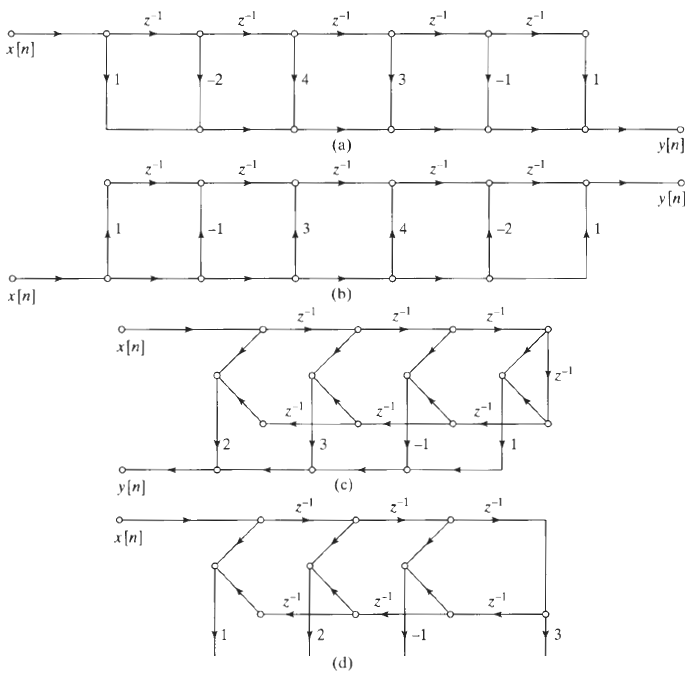
Several flow graphs are shown in Figure. Determine the transpose of each flow graph, and verify that in each case the original and transposed flow graphs have the same systemfunction.
Consider the system in Figure. (a) Find the system function relating the z-transforms of the input and output. (b) Write the difference equation that is satisfied by the input sequence x[n] and the output sequence y[n]. (c) Draw a signal flow graph that has the same input-output relationship as
A linear time-invariant system with system function is to be implemented using a flow graph of the form shown in Figure. (a) Fill in all the coefficients in the diagram of Figure. Is your solution unique? (b) Define appropriate node variables in Figure, and write the set of difference equations
The flow graph shown in Figure is noncomputable; i.e., it is not possible to compute the output using the difference equations represented by the flow graph because it contains a closed loop having no delay elements. (a) Write the difference equations for the system of Figure, and from them, find
The impulse response of a linear time-invariant system is lal." alt = "The impulse response of a linear time-invariant system is (a)" alt = "The impulse response of a linear time-invariant system is (a)" alt="The impulse response of a linear time-invariant system is (a)" class="fr-fic
Consider an FIR system whose impulse response isThis system is an example of a class of filters known as frequency-sampling filters, problem 6.37 discusses these filters in detail. In this problem, we consider just one specific case.(a) Sketch the impulse response of the system for the cases n0 = 0
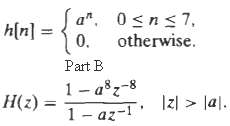
Consider the discrete-time system depicted in Figure, (a) Write the set of difference equations represented by the flow graph of Figure. (b) Determine the system function H1(z) = y1(z)/X(z) of the system in Figure, and determine the magnitudes and angles of the poles of H1(z) as a function of r for
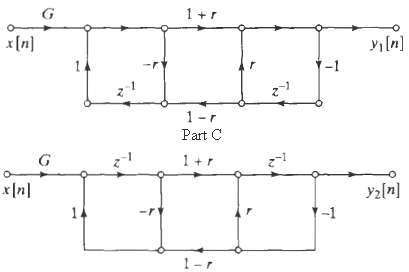
The three networks in Figure are all equivalent implementations of the same two-input, two-output linear time-invariant system. (a) Write the difference equations for network A.? (b) Find values of ?, b, c, and d for network B in terms of?r in network A such that the two systems are
All branches of the signal flow graphs in this problem have unity gain unless specifically indicated otherwise. (a) The signal flow graph of system A, shown in Figure, represents a causal LTI system. Is it possible to implement the same input-output relationship using fewer delays? If it is
Consider an all-pass system whose system function is? (a) Draw the direct from I signal flow graph for the system. How many delays and multipliers do you need? (Do not count multiplying by ? 1.) (b) Draw a signal flow graph for the system that uses one multiplier. Minimize the number of delays. (c)
The flow graph shown in Figure is an implementation of a causal, LTI system. (a) Draw the transpose of the signal flow graph. (b) For either the original system of its transpose, determine the difference equation relating the input x[n] to the output y[n].? (c) Is the system BIBO stable? (d)
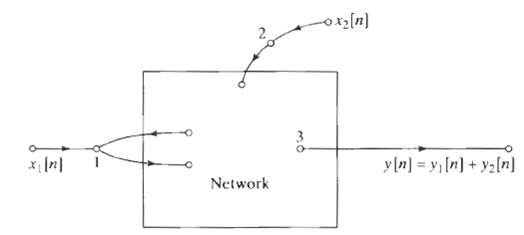
Consider a linear time-invariant system with two inputs, as depicted in Figure. Let h1[n] and h2[n] be the impulse responses from nodes 1 and 2, respectively, to the output, node 3. Show that if x1[n] and x2[n] are uncorrelated, then their corresponding outputs y1[n] and y2[n] are also uncorrelated.
The networks in Figure all have the same system function. Assume that the systems in the figure are implemented using (B + 1)-bit fixed-point arithmetic in all the computations. Assume also that all products are rounded to (B + 1) bits before additions are performed.(a) Draw linear-noise models for
A causal LTI system has a system function (a) Is this system stable? (b) If the coefficients are rounded to the nearest tenth, would the resulting system best able?
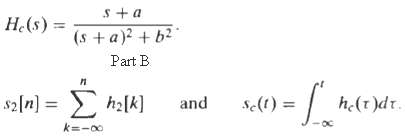
Consider a causal continuous-time system with impulse response hc(t) and system function? (a) Use impulse invariance to determine H1(z) for a discrete-time system such that h1[n] = hc(n T). (b) Use step invariance to determine H2(z) for a discrete-time system such that s2[n] = sc(n T), where (c)
A discrete-time lowpass filter is to be designed by applying the impulse invariance method to a continuous- time Butterworth filter having magnitude-squared functionThe specifications for the discrete-time system are those of Example 7.2, i.e., 0.89125 ≤ |H(ejω) | ≤ 1,
We wish to use impulse invariance or the bilinear transformation to design a discrete-time filter that meets specifications of the following form: For historical reasons, most of the design formulas, tables, or charts for continuous-time filters are normally specified with a peak gain of unity
The system function of a discrete-time system is (a) Assume that this discrete-time filter was designed by the impulse invariance method with Td = 2; i.e., h[n] = 2hc(2n), where hc(t) is real. Find the system function Hc(s) of a continuous-time filter that could have been the basis for the design.
We wish to use the Kaiser Window method to design a discrete-time filter with generalized linear phase that meets specifications of the following form:
We wish to use the Kaiser Window method to design a real-valued FIR filter with generalized linear phase that meets the following specifications: This specification is to be met by applying the Kaiser Window to the ideal real-valued impulse response associated with the ideal frequency response
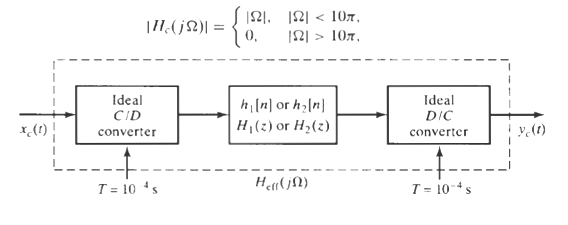
We are interested in implementing a continuous-time LTI lowpass filter H(j?) using the system shown in Fig. when the discrete-time system has frequency response Hd(ej?). The sampling time T = 10?4 second and the input signal xc(t) is appropriately bandlimited with Xc(j?) = 0 for |?| ?
Suppose we design a discrete-time filter using the impulse invariance technique with an ideal continuous-time lowpass filter as a prototype. The prototype filter has a cutoff frequency of Ωc = 2π(1000) rad/s, and the impulse invariance transformation uses T = 0.2 ms. What is the cutoff frequency
We wish to design a discrete-time lowpass filter using the bilinear transformation on a continuous-time ideal lowpass filter. Assume that the continuous-time prototype filter has cutoff frequency Ωc = 2π(2000) rad/s and we choose the bilinear transformation parameter T = 0.4 ms. what is the
Suppose that we have an ideal discrete-time lowpass filter with cutoff frequency ωc = π/4. In addition, we are told that this filter resulted from applying impulse invariance to a continuous-time prototype lowpass filter using T = 0.1 ms. what was the cutoff frequency Ωc for the prototype
An ideal discrete-time highpass filter with cutoff frequency ωc = π/2 was designed using the bilinear transformation with T = 1 ms. what was the cutoff frequency Ωc for the prototype continuous-time ideal highpass filter?
An ideal discrete-time lowpass filter with cutoff frequency ωc = 2π/5 was designed using impulse invariance from an ideal continuous-time lowpass filter with cutoff frequency Ωc = 2π (4000) rad/s. What was the value of T? Is this value unique? If not, find another value of T consistent with
The bilinear transformation is used to design an ideal discrete-time lowpass filter with cutoff frequency ωc = 3π/5 from an ideal continuous-time lowpass filter with cutoff frequency Ωc = 2π (300) rad/s. Give a choice for the parameter T that is consistent with this information. Is this choice
Wish to design an FIR lowpass filter satisfying the specifications 0.95 < H(ejω) < 1.05, 0 ≤ |ω| ≤ 0.25π,−0.1 < H(ejω) < 0.1, 0.35π ≤ |ω| ≤ π,by
We wish to design an FIR lowpass filter satisfying the specifications 0.98 < H(ejω) < 1.02, 0 ≤ |ω| ≤ 0.63π,−0.15 < H(ejω) < 0.15, 0.65π ≤ |ω| ≤ π, by applying
Suppose that we wish to design a bandpass filter satisfying the following specification: −0.02 < |H(ejω)| < 0.02, 0 ≤ |ω| ≤ 0.2π, 0.95 < |H(ejω)| < 1.05, 0.3π ≤ |ω| ≤ 0.7π,−0.001 <
Suppose that we wish to design a highpass filter satisfying the following specification: −0.04 < |H(ejω)| < 0.04, 0 ≤ |ω| ≤ 0.2π,0.995 < |H(ejω)| < 1.005, 0.3π ≤ |ω| ≤ π.The filter will be
We wish to design a discrete-time ideal bandpass filter that has a passband π/4 ≤ ω ≤ π/2 by applying impulse invariance to an ideal continuous-time bandpass filter with passband 2π(300) ≤ Ω ≤ 2π(600). Specify a choice for T that will produce the desired filter. Is your choice of T
Specify whether the following statement is true or false. Justify your answer, if the bilinear transformation is used to transform a continuous-time all-pass system to discrete-time system, the resulting discrete-time system will also be an all pass system
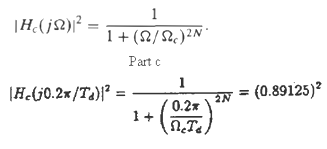
Suppose that we are given a continuous-time lowpass filter with frequency response Hc(jω) such that 1− δ1 ≤ | Hc(jΩ) | ≤ 1 + δ1, |Ω| ≤ Ωp,|Hc(j Ω)| ≤ δ2, |Ω| ≥ Ωs. A set of
A continuous-time filter with impulse response hc(t) and frequency-response magnitude is to be used as the prototype for the design of a discrete-time filter. The resulting discrete-time system is to be used in the configuration of Figure to filter the continuous-time signal xc(t).(a) A
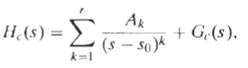
Assume that Hc(s) has an r th-order pole at s = s0, so that Hc(s) can be expressed as where Gc(s) has only first-order poles. Assume Hc(s) is causal. (a) Give a formula for determining the constants Ak from Hc(s). (b) Obtain an expression for the impulse response hc(t) in terms of s0 and gc(t),
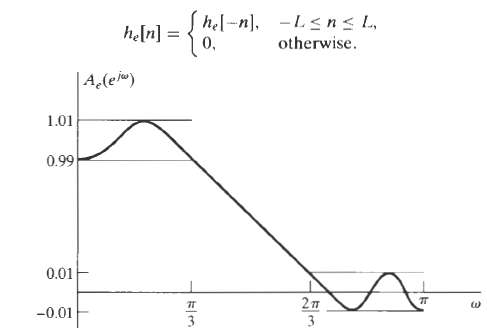
Figure shows the frequency response Ae(ej?) of a discrete-time FIR system for which the impulse response is (a) Show that Ae(ej?) cannot correspond to an FIR filter generated by the parks-McClellan algorithm with passband edge frequency of ?/3, a stopband edge frequency of 2?/3, and an error-
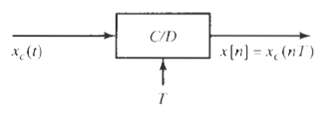
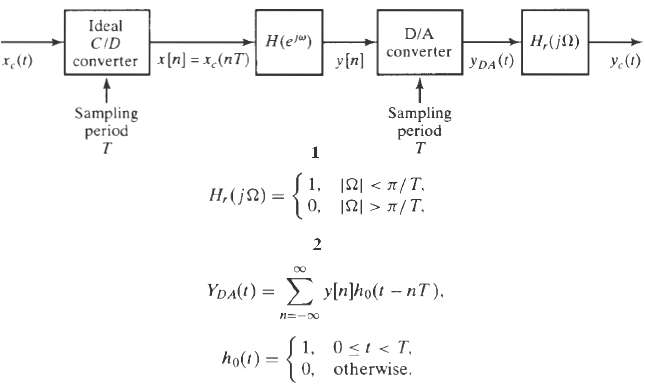
Consider the system in Figure. 1. Assume that Xc(j?) = 0 for |?| ? ? / T and that denotes an ideal lowpass reconstruction filter. 2. The D/A converter has a built-in zero-order-hold circuit, so that where (we neglect quantization in the D/A converter.)? 3. The second system in Figure is a
In this problem, we consider the effect of mapping continuous-time filters to discrete-time filters by replacing derivatives in the differential equation for a continuous-time filter by central differences to obtain a difference equation. The first central difference of a sequence x[n] is defined
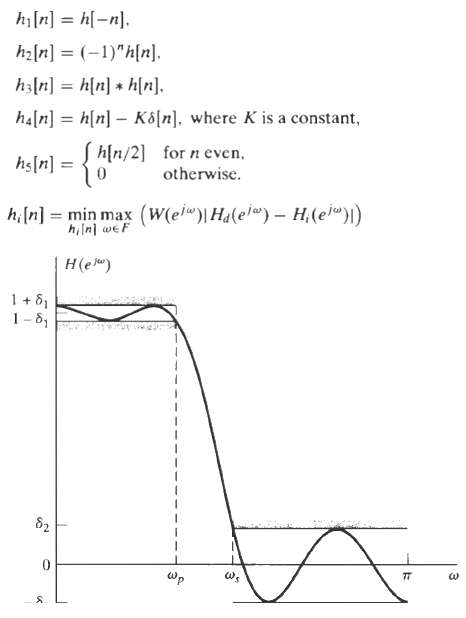
Let h[n] be the optimal type I equiripple lowpass filter shown in Figure, designed with weighting function W(ej?) and desired frequency response Hd(ej?). For simplicity, assume that the filter is zero phase (i.e., noncausal). We will use h[n] to design five different FIR filters as follows:? For
Suppose that you have used the parks-McClellan algorithm to design a causal FIR linear-phase system. The system function of this system is denoted H(z). The length of the impulse response is 25 samples, h[n] = 0 for n < 0 and for n > 24, and h[0] ≠ 0. For each of the following questions,
Suppose xc(t) is a periodic continuous-time signal with period 1 ms and for which the Fourier series isThe Fourier series coefficients αk are zero for |k| > 9.xc(t) is sampled with a sample spacing T = 1/6 × 10−3 s to form x[n]. That is,(a) Is x[n] periodic and, if so, with what period?(b) Is
Suppose x[n] is a periodic sequence with period N. Then x[n] is also periodic with 3N. Let X[k] denote the DFS coefficients of x[n] considered as a periodic sequence with period N, and let X3[k]denote the DFS coefficients of x[n]?considered as a periodic sequence with period 3N. (a) Express X3[k]
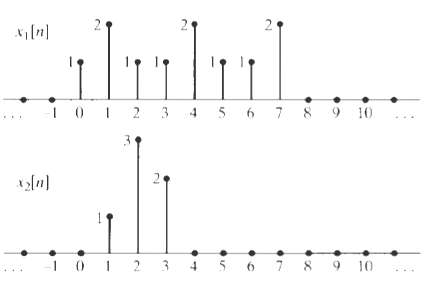
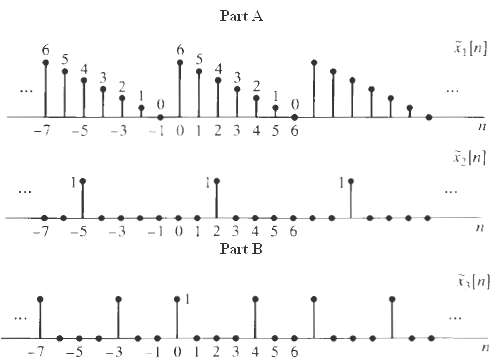
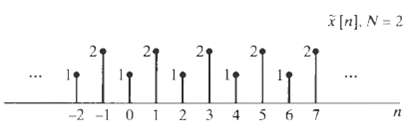
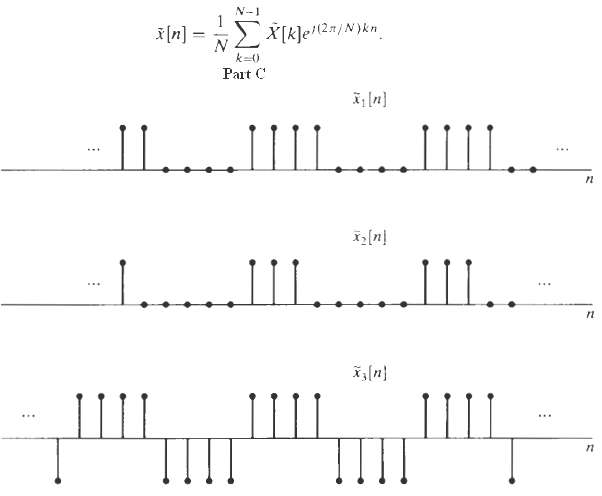
Figure shows three periodic sequences x1[n] through x3[n]. These sequences can be expressed in a Fourier series as (a) For which sequences can the time origin be chosen such that all the X[k] are real? (b) For which sequences can the time origin be chosen such that all the X[k] (except for k an
Consider the sequence x[n] given by x[n] = ?n u[n]. A periodic sequence x[n] is constructed from x[n] in the following way: (a) Determine the Fourier transform X(ej?) of x[n]. (b) Determine the discrete Fourier series X[k] of x[n]. (c) How is X[k] related to X(ej?)?
Compute the DFT of each of the following finite-length sequences considered to be of length N (where N is even):
Consider the complex sequence (a) Find the Fourier transform X(ej?) of x[n]. (b) Find the N-point DFT X[k] of the finite-length sequence x[n]. (c) Find the DFT of x[n] for case ?0 = 2?k0/N, where k0 is an integer.
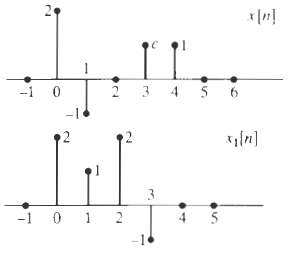
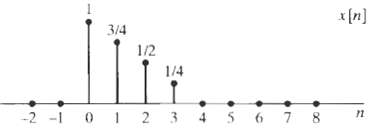
Consider the finite-length sequence x[n] in Figure. Let X(z) be the z-transform of x[n]. If we sample X(z) at z = ej(2?/4)k, k = 0, 1, 2, 3, we obtain? X1[k] = X(z) |z = ej(2?/4)k,? ? ? ? ? ? k = 0, 1, 2, 3. Sketch the sequence x1[n] obtained as the inverse DFT of X1[k].
Let X(ejω) denote the Fourier transform of the sequence x[n] = (1/2)n u[n]. Let y[n] denote a finite-duration sequence of length 10; i.e., y[n] = 0, n < 0, and y[n] = n ≥ 10. The 10-point DFT of y[n], denoted by Y[k], corresponds to 10 equally spaced samples of X(ejω); i.e., Y[k] =
Consider a 20-point finite-duration sequence x[n] such that x[n] = 0 outside 0 ≤ n ≤ 19, and let X(ejω) represent the Fourier transform of x[n].(a) If it is desired to evaluate X(ejω) at ω = 4π/5 by computing one M-point DFT, determine the smallest possible M , and develop a method to
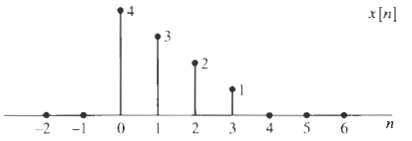
The two eight-point sequences x1[n] and x2[n] shown in Figure have DFTs X1[k] and X2[k], respectively. Determine the relationship between X1[k] and X2[k].
Figure shows two finite-length sequences x1[n] and x2[n]. Sketch their six-point circularconvolution.
Suppose we have two four-point sequences x[n] and h[n] as follows: x[n] = cos (πn/2). n = 0, 1, 2, 3. h[n] = 2n, n = 0, 1, 2, 3.(a) Calculate the four-point DFT X[k].(b) Calculate
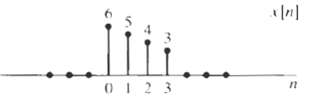
Consider the finite-length sequence x[n] in Figure. The five-point DFT of x[n] is denoted by x[k]. Plot the sequence y[n] whose DFT is
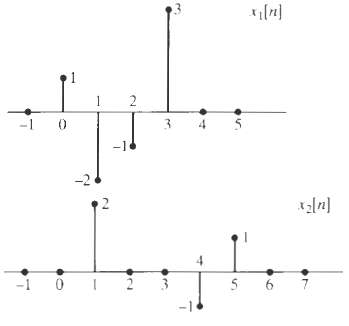
Two finite-length signals, x1[n] and x2[n], are sketched in Figure. Assume that x1[n] and x2[n] are zero outside of the region shown in the figure. Let x3[n] be the eight-point circular convolution of x1[n] with x2[n]; i.e., x3[n] = x1[n] (8) x2[n]. Determine x3[2].
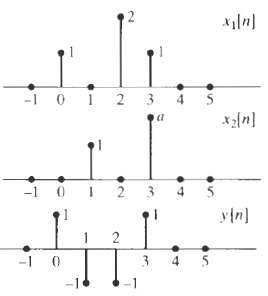
Figure shows two sequence x1[n] and x2[n]. The value of x2[n] at time n = 3 is not known, but is shown as a variable ?. Figure shows y[n], the four-point circular convolution of x1[n] and x2[n]. Based on the graph of y[n], can you specify ? uniquely? If so, what is a? If not, give two possible
Figure shows a six-point discrete-time sequence x[n]. Assume that x[n] = 0 outside the interval shown. The value of x[4] is not known and is represented as b, that the sample shown for b in the figure is not necessarily to scale, Let X(ej?) be the DTFT of x[n] and X1[k] be samples of X(ej?) every
Figure shows two finite-length sequences x1[n] and x2[n]. What is the smallest N such that the N-point circular convolution of x1[n] and x2[n] are equal to the linear convolution of these sequences, i.e., such that x1[n] (N) x2[n] = x1[n] * x2[n]?
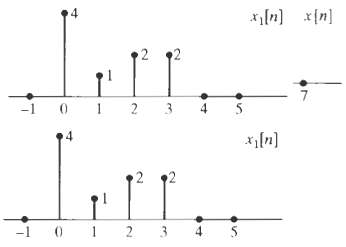
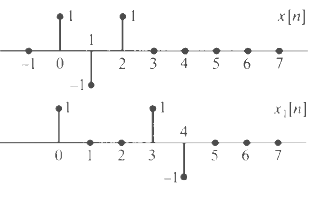
Figure shows a sequence x[n] for which the value of x[3] is an unknown constant c. The sample with amplitude c is not necessarily drawn to scale. Let X1[k] = X[k]ej2?3k/5. Where X[k] is the five-point DFT of x[n]. The sequence x1[n] plotted in Figure is the inverse DFT of X1[k]. What is the value
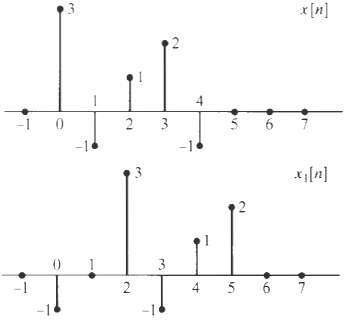
Two finite-length sequences x[n] and x1[n] are shown in Figure. The DFTs of these sequences, X[k] and X1[k], respectively, are related by equation? X1[k] = X[k]e ?j (2?km/6), where m is an unknown constant. Can you determine a value of m consistent with Figure? Is so, justify your answer. If not,
Two finite-length sequences x[n] and x1[n] are shown in Figure. The N-point DFTs of these sequences, X[k] and X1[k], respectively, are relate by the equation X1[k] = X[k]ej2?k2/N, where N is an unknown constant. Can you determine a value of N consistent with Figure? Is your choice for N unique? If
(a) Figure shows two periodic sequences, x1[n] and x2[n], with period N = 7. Find a sequence y1[n] whose DFS is equal to the product of the DFS of x1[n] and the DFS of x2[n], i.e.,? Y1[k] = X1[k] X2[k]. (b) Figure shows a periodic sequence x3[n] with period N = 7. Find a sequence y2[n] whose DFS is
x[n] denotes a finite-length sequence of length N. show thatx[((– n))N] = x[((N – n))N].
Consider a finite-duration sequence x[n] of length p such that x[n] = 0 for n < 0 and n ≥ P. We want to compute samples of the Fourier transform at the N equally spaced frequencies ωk = 2πk/N, k = 0, 1,…, N – 1.Determine and justify procedures for computing the N
Consider a real finite-length sequence x[n] with Fourier transform X(ejω) and DFT X[k]. If Jm{X[k]} = 0, k= 0,1,…., N – 1. Can we conclude that Jm{X(ejω)} = 0, − π ≤ ω ≤ π?State
Consider the finite-length sequence x[n] in Figure. The four-point DFT of x[n] is denoted X[k]. Plot the sequence y[n] whose DFT is? Y[k] = W43k X[k].
Consider the real finite-length sequence x[n] shown in Figure. (a) Sketch the finite-length sequence y[n] whose six-point DFT is? Y[k] = W64k X[k], where X[k] is the six-point DFT of x[n]. (b) Sketch the finite-length sequence w[n] whose six-point DFT is? W[k] = Re{X [k]}. (c) Sketch the
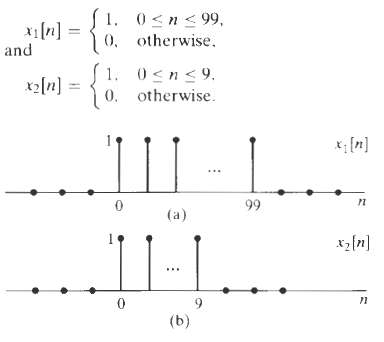
Figure shows two sequences, (a) Determine and sketch the linear convolution x1[n] * x2[n]. (b) Determine and sketch the 100-point circular convolution x1[n] (100) x2[n]. (c) Determine and sketch the 110-point circular convolution x1[n] (110) x2[n].
Figure shows a finite-length sequence x[n]. Sketch the sequences? x1[n] = x[((n ? 2))4].? ? ? ? ? ? ? ?? 0 ? n ? 3, ?and? x2[n] = x[((? n))4]. ? ? ? ? ? ? ? ? ? 0 ? n ? 3
Figure shows two finite-length sequences. Sketch their N-point circular convolution for N = 6 and for N = 10.
Consider a finite-length sequence x[n] of length N: i.e., x[n] = 0 outside 0 ≤ n ≤ N – 1.X(ejω) denotes the Fourier transform of x[n]. X[k] denotes the sequence of 64 equally spaced samples of X(ejω), i.e., X[k] = X(ejω)|ω=2πk/64.It is
Showing 600 - 700
of 1744
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Last
Step by Step Answers

![0 <n< 14, otherwise. hlnl = { i3 (1 + cos[(2r/15)(n – no)]), 0, Part B je-i2an0/15 1 – ei2n/157-1 jei2ano/15 1 – e](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1550/1/4/0/3065c654392783301550140305328.jpg)
![bo y(n) y[n] x[n} x[n] bị b1 (a) (b) x[n] y[n} b1 (c)](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1550/1/4/1/3755c6547bf9f64f1550141375029.jpg)

![0 < [w] < 0.27, 0.37 < |w| < 0.4757. 0.5257 < lwl < . 0.9 < H(ej](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1550/1/4/2/4515c654bf3859181550142450357.jpg)
![Pait A d* y(t) ak drk d'x(t) Σα -Σ dt' k=0 1=0 ara k)ty[r]} = b,A](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1550/1/4/5/3145c6557220b4231550145313345.jpg)
![arei(2zk!/10 *) X, (1) = k=-9 n10-3 x[n] = x, 6.](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1550/1/4/5/9635c6559ab06be91550145962343.jpg)

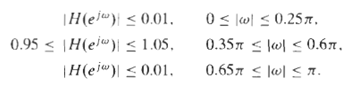
![Ь 0 1 2 3 4 5 6 7 8 x2{n] 0 1 2 3 4 5 6 7 8 п](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1550/1/4/6/9165c655d64e0bf11550146916225.jpg)