Discrete Time Signal Processing 2nd Edition Alan V. Oppenheim, Rolan W. Schafer - Solutions
Discover comprehensive solutions and answers for "Discrete Time Signal Processing 2nd Edition" by Alan V. Oppenheim and Rolan W. Schafer online. Our extensive collection includes an answers key, solutions manual, and solutions in PDF format, ensuring all solved problems are at your fingertips. Explore detailed chapter solutions, step-by-step answers, and a thorough instructor manual tailored to enhance your understanding. Whether you're seeking questions and answers for exam preparation or looking to access a test bank, this textbook resource is your go-to. Enjoy free download options to gain instant access to these invaluable study aids.


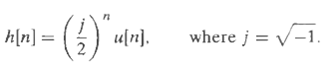
![yln] – yln – 1]+ ¿yln – 2] = ;x[n – 1].](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1549/8/7/8/2765c614404686801549925202863.jpg)



![x[n] 8. -2 -1 0 1 2 3 4 5 6 -1 -1](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1553/0/6/7/6025c91ee52b2df61553067604216.jpg)
.PNG)