Process Dynamics And Control 4th Edition Dale E. Seborg, Thomas F. Edgar, Duncan A. Mellichamp, Francis J. Doyle - Solutions
Discover a comprehensive resource for "Process Dynamics And Control 4th Edition" by Dale E. Seborg and co-authors, offering a wide array of solutions and answers. Access the answers key and detailed step-by-step answers through our online platform. From solved problems to chapter solutions, our solution manual and instructor manual are designed to enrich your understanding. Explore the test bank and solutions PDF for an in-depth insight into this textbook. Available for free download, these resources provide a complete guide to the questions and answers, making your learning process seamless and efficient.


![IOR) = k,[0,]C,[T] – kj[OR] – H[Og] dt IMRNA] = k,[OR]C_[T] – k„[MRNA] – µ[MRNA] dt [E] = k½[MRNA] – µ[E]](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1534/3/3/2/1695b740d093d11a1534314442349.jpg)

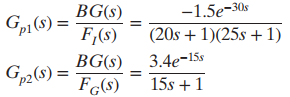
![100 90 80 70 60 50 40 Mean: BG .. Mean: CGM1 Mean: CGM2 20 10 250 350 50 100 150 200 300 400 Blood Glucose [mg / dL] Fig](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1533/8/0/7/5595b6c0bc776fcf1533789817850.jpg)
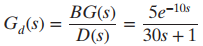
![2.5 86 84 82 80 78 * 76 74 72 70 2.5 3 3.5 4.5 5.5 6. 6.5 Time (min) Figure E23.4 [yuy] a HR [bpm]](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1533/8/0/5/7455b6c04b1a5a7a1533788004132.jpg)



![moles of A reacting (time) (volume) -ra = k,cA – k,Cg, ľA [=]](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1533/6/3/8/1385b6975fa387a71533620388738.jpg)







![T,(s) °F 2.5e-s W;(s)¯ 10s +1 T(s) 0.9e-2s T{(s) [=] Ib/s -[=] dimensionless 5s + 1](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1533/2/9/1/7185b642cc64f0eb1533273957335.jpg)



![Qi [m³/min] Н' Hap P' Нур [m] K, ts + 1 Кт G(s) Кір K, [%] [%] [%] [psi) [m3/min] [m] Н' Hт [%] [m] Figure 1](https://dsd5zvtm8ll6.cloudfront.net/si.question.images/images/question_images/1533/2/9/3/5705b643402b4e531533275809645.jpg)